ExSpurt
 I have avoided building a mini sumo for several years while I concentrated on the 1Kg and 3Kg classes. Once Executioner was finished, I needed a new challenge. About that time, CIRC was dropping the 1Kg class to make more time to get into line following contests. I really didn’t want to drive 200 miles for one sumo class and a very old line follower that played the same old song, so I decided to build a mini sumo specifically for the CIRC event.> I have avoided building a mini sumo for several years while I concentrated on the 1Kg and 3Kg classes. Once Executioner was finished, I needed a new challenge. About that time, CIRC was dropping the 1Kg class to make more time to get into line following contests. I really didn’t want to drive 200 miles for one sumo class and a very old line follower that played the same old song, so I decided to build a mini sumo specifically for the CIRC event.> |
||||||||
 The Maxon motors on the BaneBots web site appeared to be a good place to start a mini sumo. Because of the length of the Maxons, designing a legal mini sumo was going to take a new wheel/tire/hub solution. I thought it was achievable, so construction was started on a test chassis. In the past, I have been unable to properly judge the performance of a specific motor, so the first mini sumo was built to be a test of construction techniques and performance. That test chassis is the ExSpurt "Mule". The photos here show the construction of the real ExSpurt which has yet to be run in a contest because ExSpurt Mule has been so successful. The Maxon motors on the BaneBots web site appeared to be a good place to start a mini sumo. Because of the length of the Maxons, designing a legal mini sumo was going to take a new wheel/tire/hub solution. I thought it was achievable, so construction was started on a test chassis. In the past, I have been unable to properly judge the performance of a specific motor, so the first mini sumo was built to be a test of construction techniques and performance. That test chassis is the ExSpurt "Mule". The photos here show the construction of the real ExSpurt which has yet to be run in a contest because ExSpurt Mule has been so successful. |
||||||||
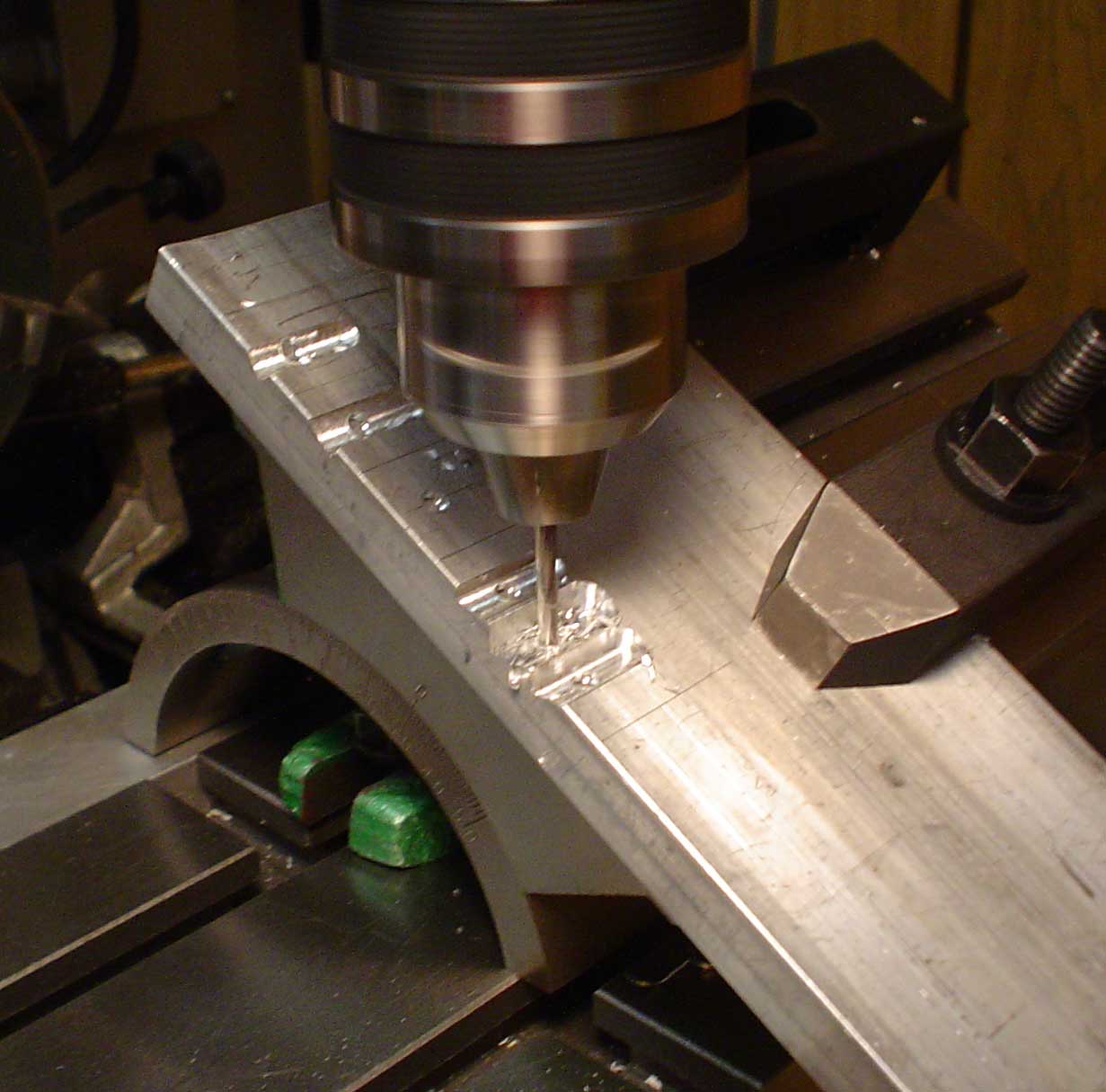
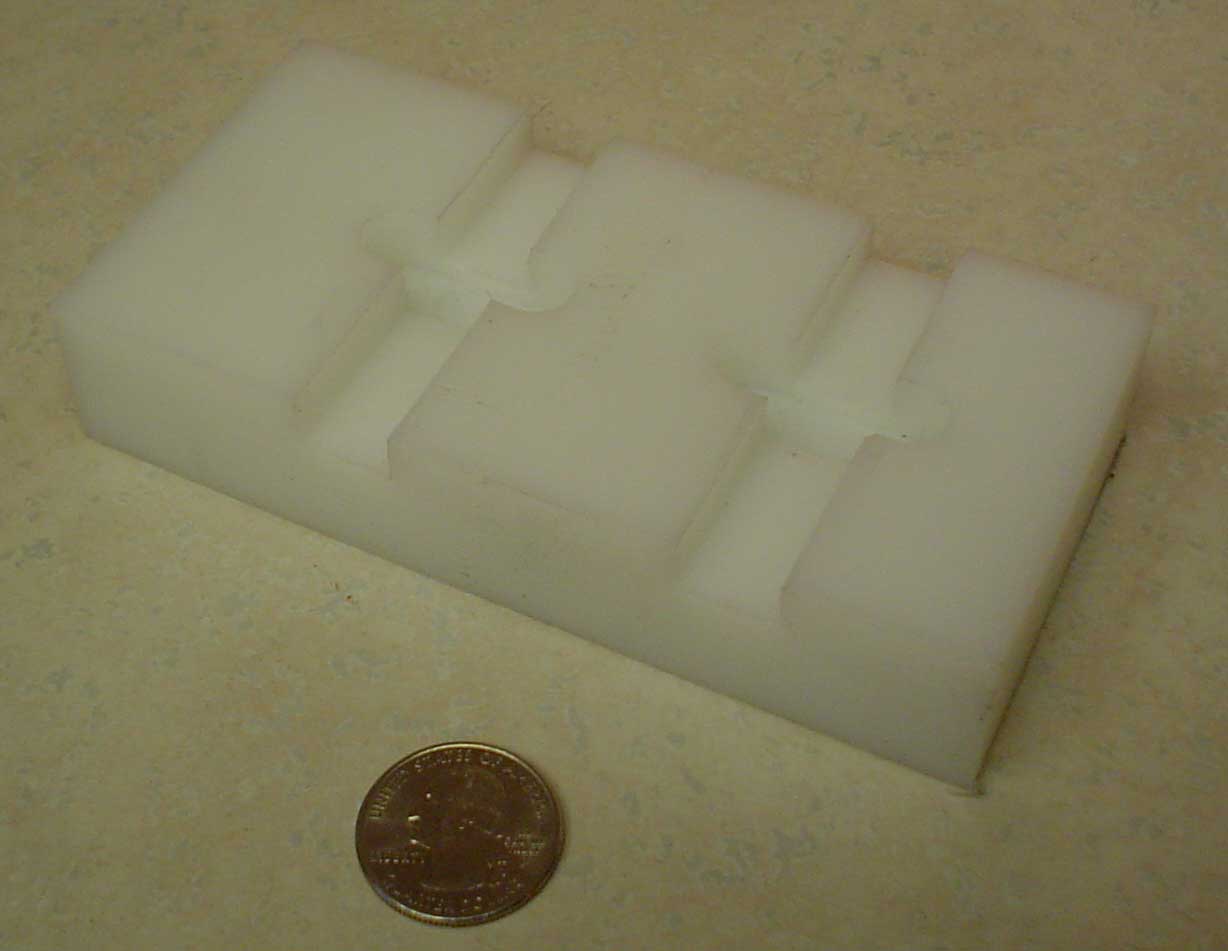 The past several robots that I have construction have used a simple machined HDPE (High Density Polyethylene) jig to hold the motors/gearboxes in place while epoxying the chassis components together. For the mini sumo the jig was 2.5” wide, 5” long, and 1” thick. Two slots were milled to hold the Maxon motors tightly aligned. A wheel base of 2” would provide sufficient room for a small Lipo battery and a simple bumper. Other slots provided clearance for electrical tabs and motor wires. The past several robots that I have construction have used a simple machined HDPE (High Density Polyethylene) jig to hold the motors/gearboxes in place while epoxying the chassis components together. For the mini sumo the jig was 2.5” wide, 5” long, and 1” thick. Two slots were milled to hold the Maxon motors tightly aligned. A wheel base of 2” would provide sufficient room for a small Lipo battery and a simple bumper. Other slots provided clearance for electrical tabs and motor wires. |
||||||||
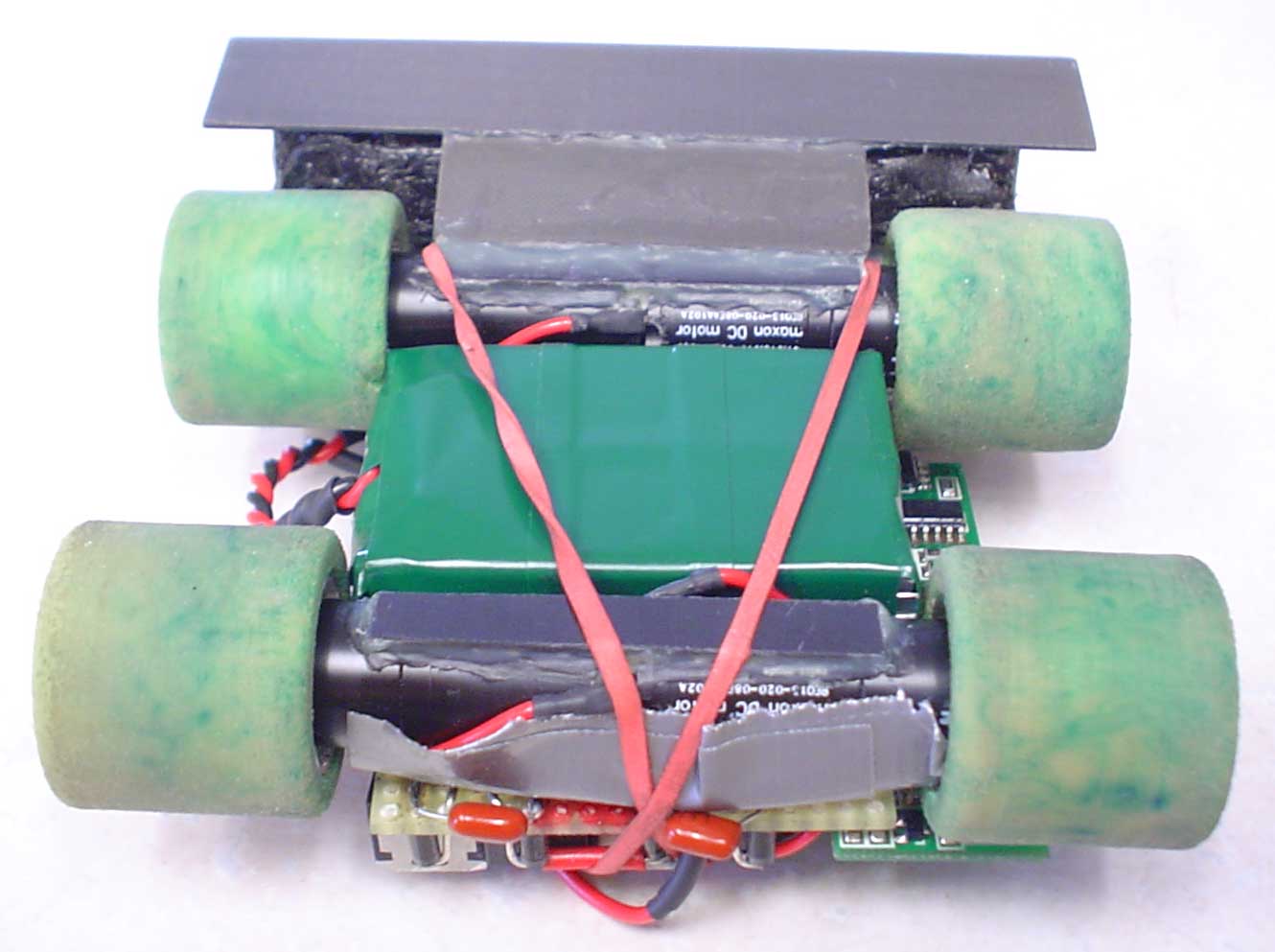
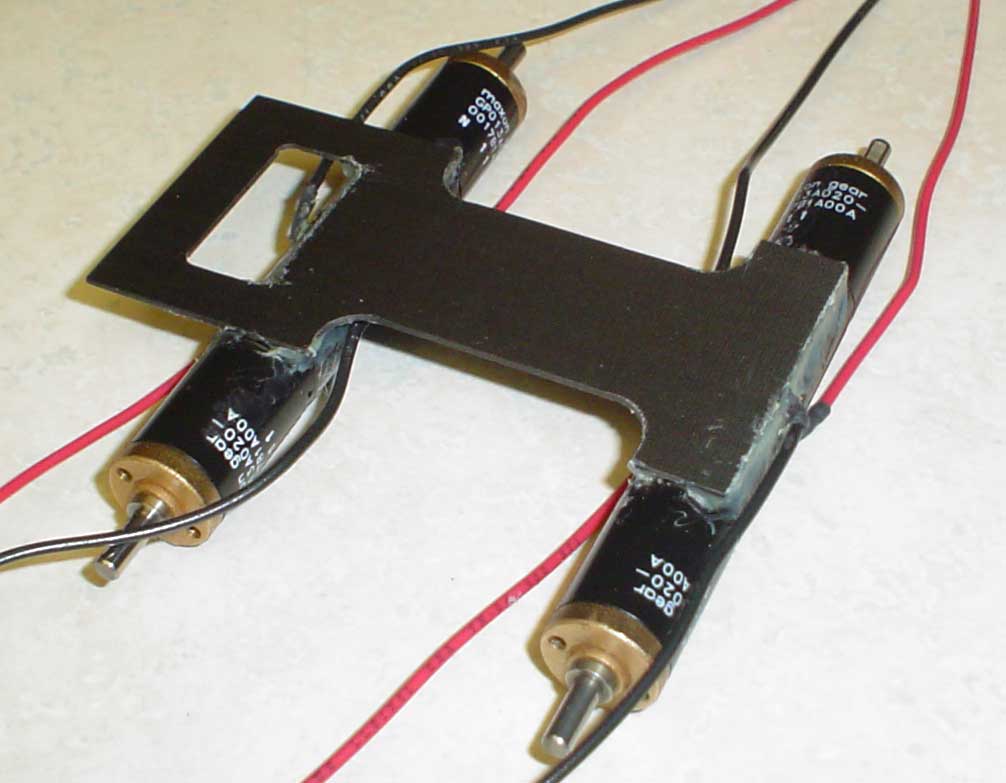
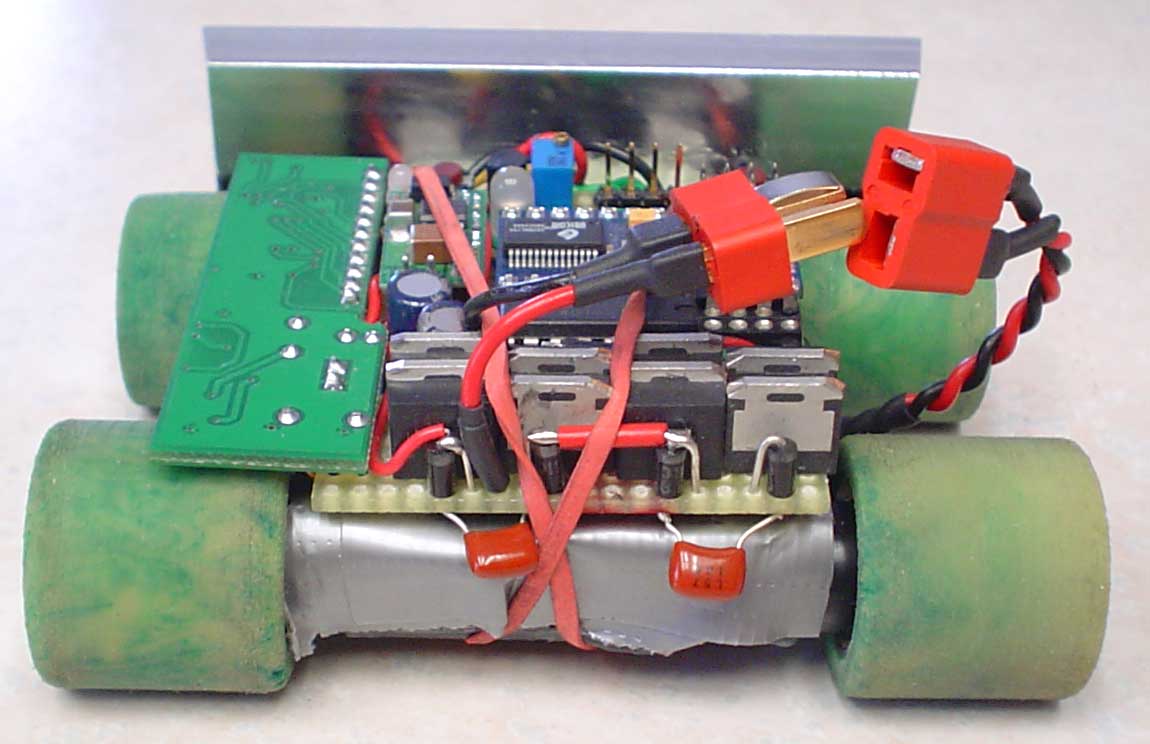
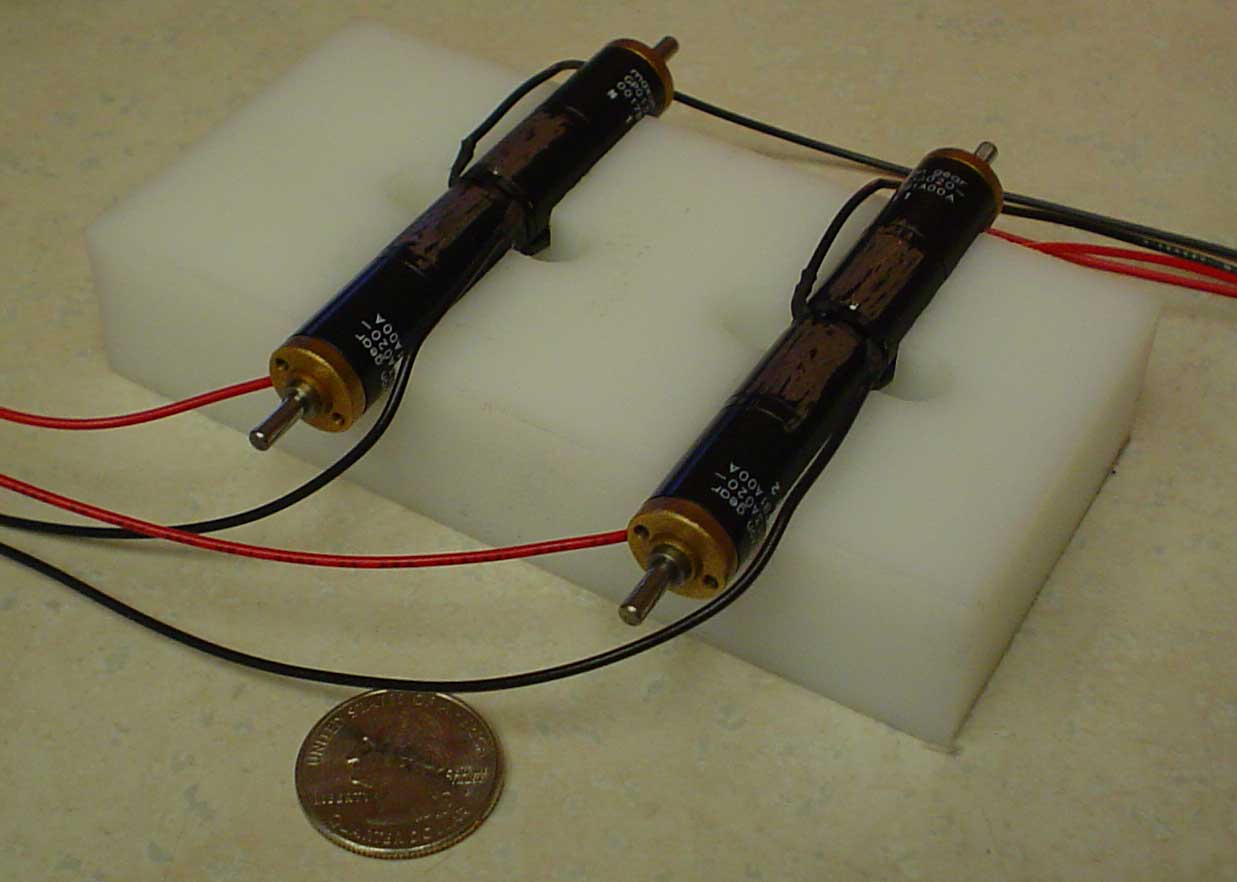 Since access was going to be limited, the motors were wired first. For good adhesion, the paint was scrapped off of the Maxon motors. In the past the chassis was epoxied to the motors, but not the gear boxes, permitting some disassembly. The same technique was used here. Also, the plastic rear covers over the Maxon brushes were removed and the motors were pushed tight together to save on width. Since access was going to be limited, the motors were wired first. For good adhesion, the paint was scrapped off of the Maxon motors. In the past the chassis was epoxied to the motors, but not the gear boxes, permitting some disassembly. The same technique was used here. Also, the plastic rear covers over the Maxon brushes were removed and the motors were pushed tight together to save on width. |
||||||||
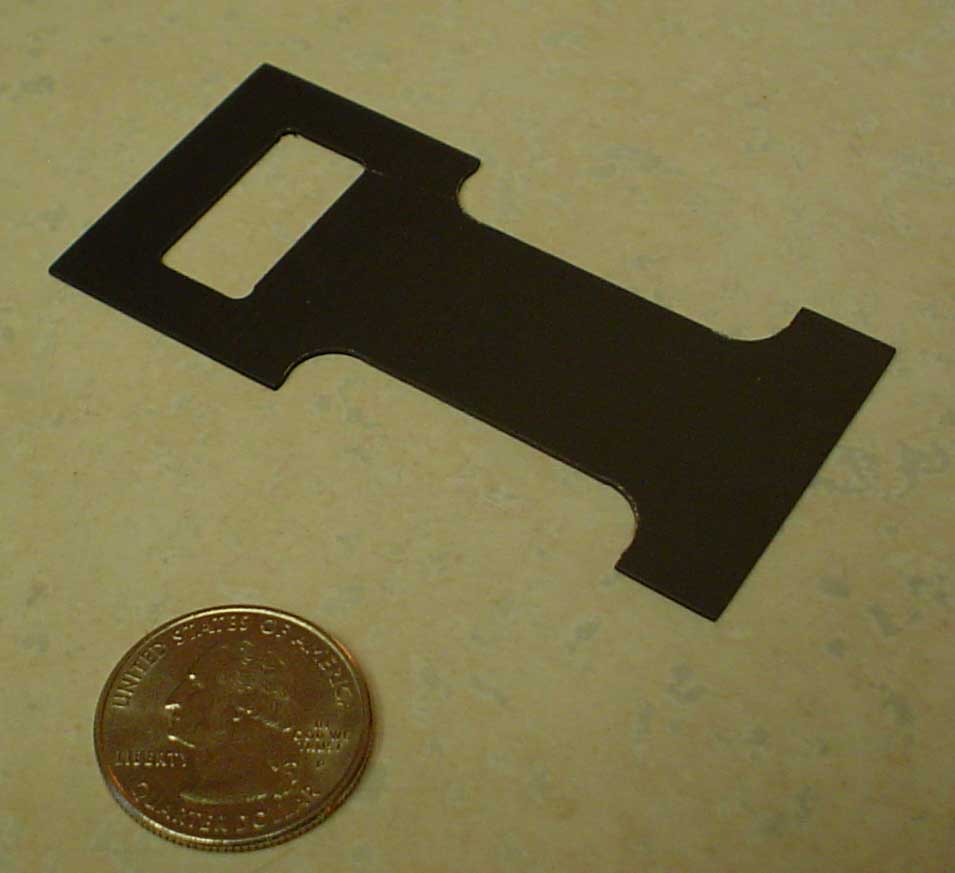 A simple chassis was milled out of .032” carbon fiber material. Yes, it was carbon fiber machined on a mill. High speed small diameter end mills work much better that the old method of a cut-off wheel in a Moto-Tool. The overall dimensions of the chassis are 3.15” long and 1.5” wide. The chassis was cut down to .865” wide in the middle to allow more chassis flex. A rectangular hole was provided to allow sensor wires to get to the circuit board while still providing a very solid bumper support. A simple chassis was milled out of .032” carbon fiber material. Yes, it was carbon fiber machined on a mill. High speed small diameter end mills work much better that the old method of a cut-off wheel in a Moto-Tool. The overall dimensions of the chassis are 3.15” long and 1.5” wide. The chassis was cut down to .865” wide in the middle to allow more chassis flex. A rectangular hole was provided to allow sensor wires to get to the circuit board while still providing a very solid bumper support. |
||||||||
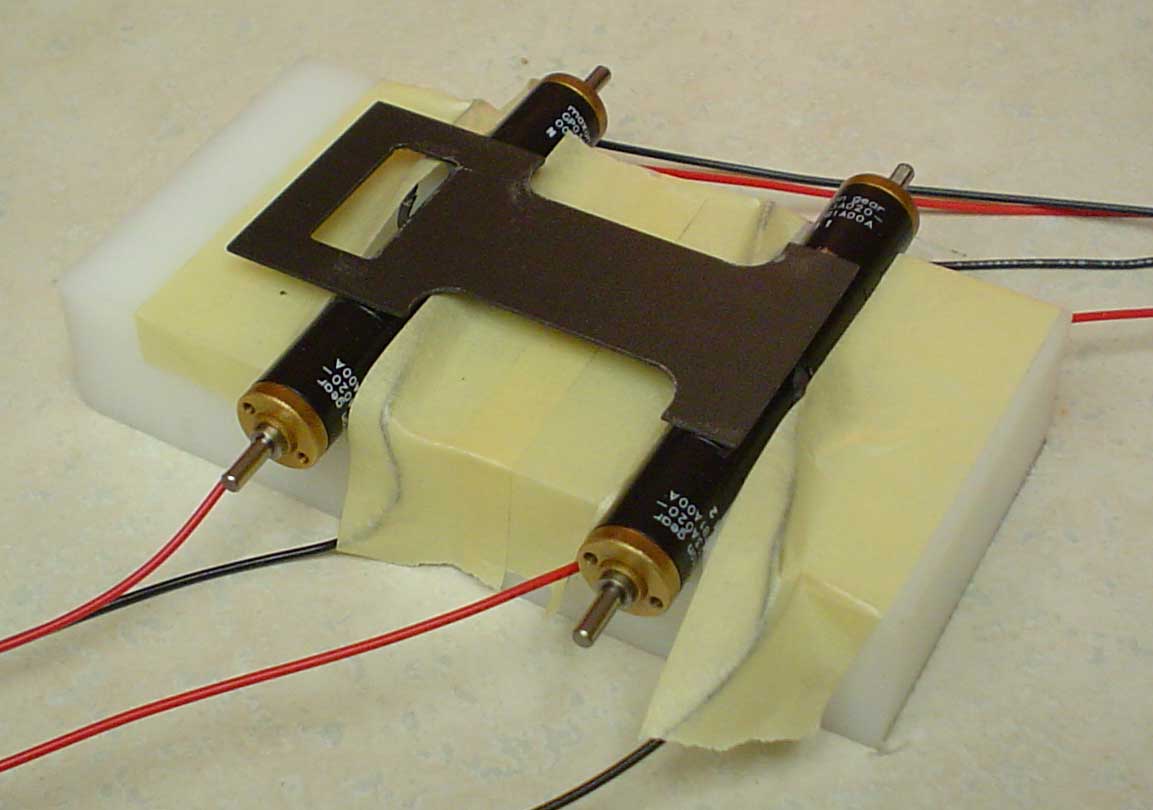 After sanding the mounting surfaces of the chassis and cleaning all surfaces with alcohol, the chassis was epoxied to the motors. I use Devcon Plastic Welder No. 14300. I have never had a joint break when using the Plastic Welder. Other structural epoxies that I have tried are very sensitive to mixing ratios, but not Plastic Welder. It is fool proof. After sanding the mounting surfaces of the chassis and cleaning all surfaces with alcohol, the chassis was epoxied to the motors. I use Devcon Plastic Welder No. 14300. I have never had a joint break when using the Plastic Welder. Other structural epoxies that I have tried are very sensitive to mixing ratios, but not Plastic Welder. It is fool proof. |
||||||||
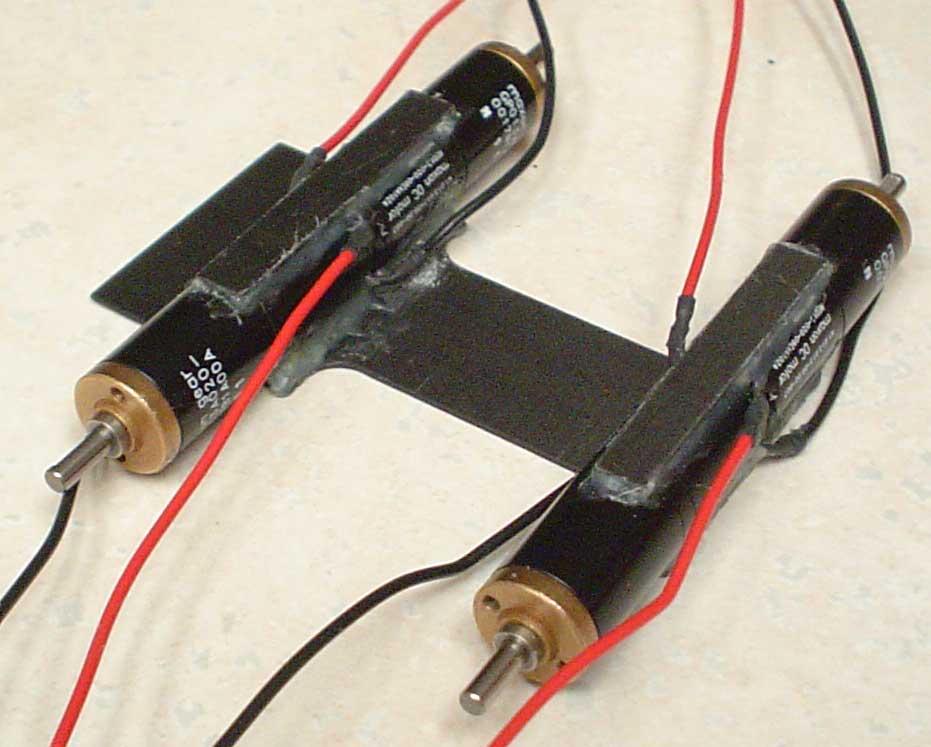 After 24 hour cure, the chassis and motors were removed from the jig and .25” x 1.7” .032” carbon fiber pieces were added to support the bottom of the motors. Also small fillets were built up around the motors and all voids in the epoxy were filled. After 24 hour cure, the chassis and motors were removed from the jig and .25” x 1.7” .032” carbon fiber pieces were added to support the bottom of the motors. Also small fillets were built up around the motors and all voids in the epoxy were filled. |
||||||||
 Here is the completed chassis, ready for bumper, batteries, control board, and wheels and tires. It was surprising how fast the chassis went together. After the long process of constructing Executioner, ExSpurt was a refreshing change. The major difference between ExSpurt Mule and the real ExSpurt is the chassis location. ExSpurt Mule has the chassis under the motors while the real ExSpurt has the chassis above the motors. The change was made for two reasons: First the chassis on top gives more room to mount lead weights (and, possibly, an optical mouse). Second, the top chassis makes for a much stronger bumper mount. Here is the completed chassis, ready for bumper, batteries, control board, and wheels and tires. It was surprising how fast the chassis went together. After the long process of constructing Executioner, ExSpurt was a refreshing change. The major difference between ExSpurt Mule and the real ExSpurt is the chassis location. ExSpurt Mule has the chassis under the motors while the real ExSpurt has the chassis above the motors. The change was made for two reasons: First the chassis on top gives more room to mount lead weights (and, possibly, an optical mouse). Second, the top chassis makes for a much stronger bumper mount. |
||||||||
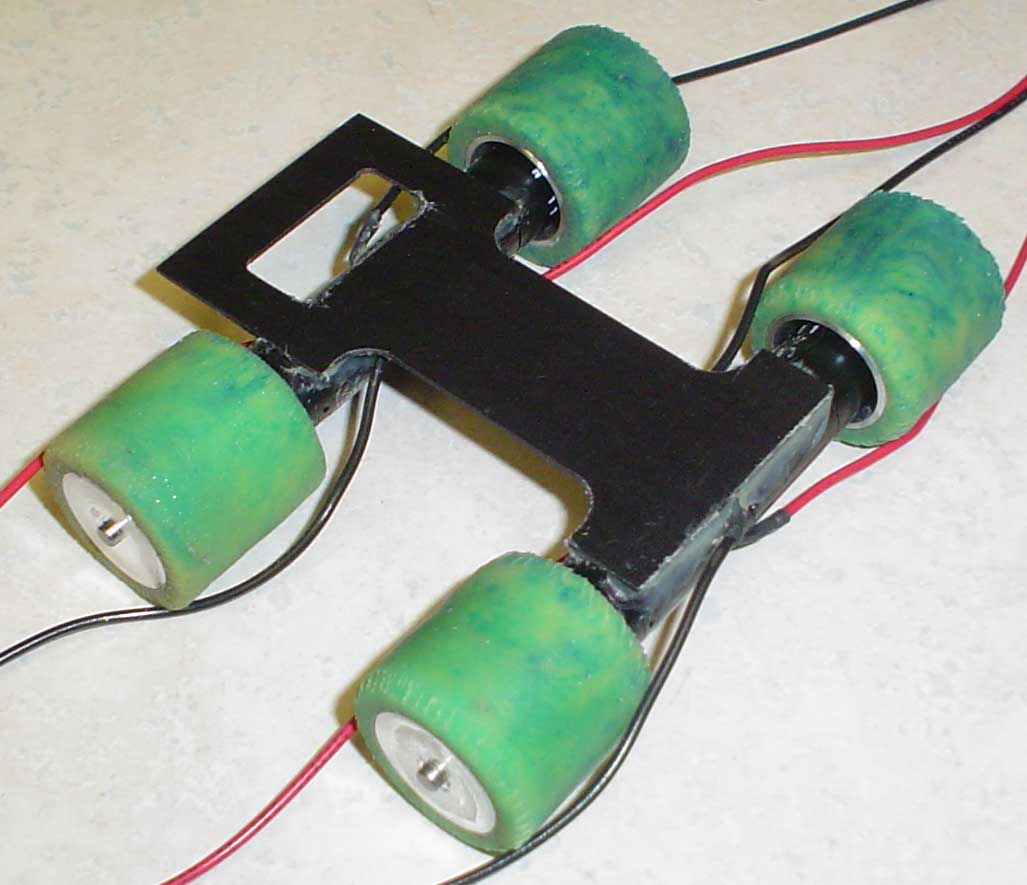 There has to be one photo of the chassis with wheels and tires. It sure does look silly at this stage. There has to be one photo of the chassis with wheels and tires. It sure does look silly at this stage. |
||||||||
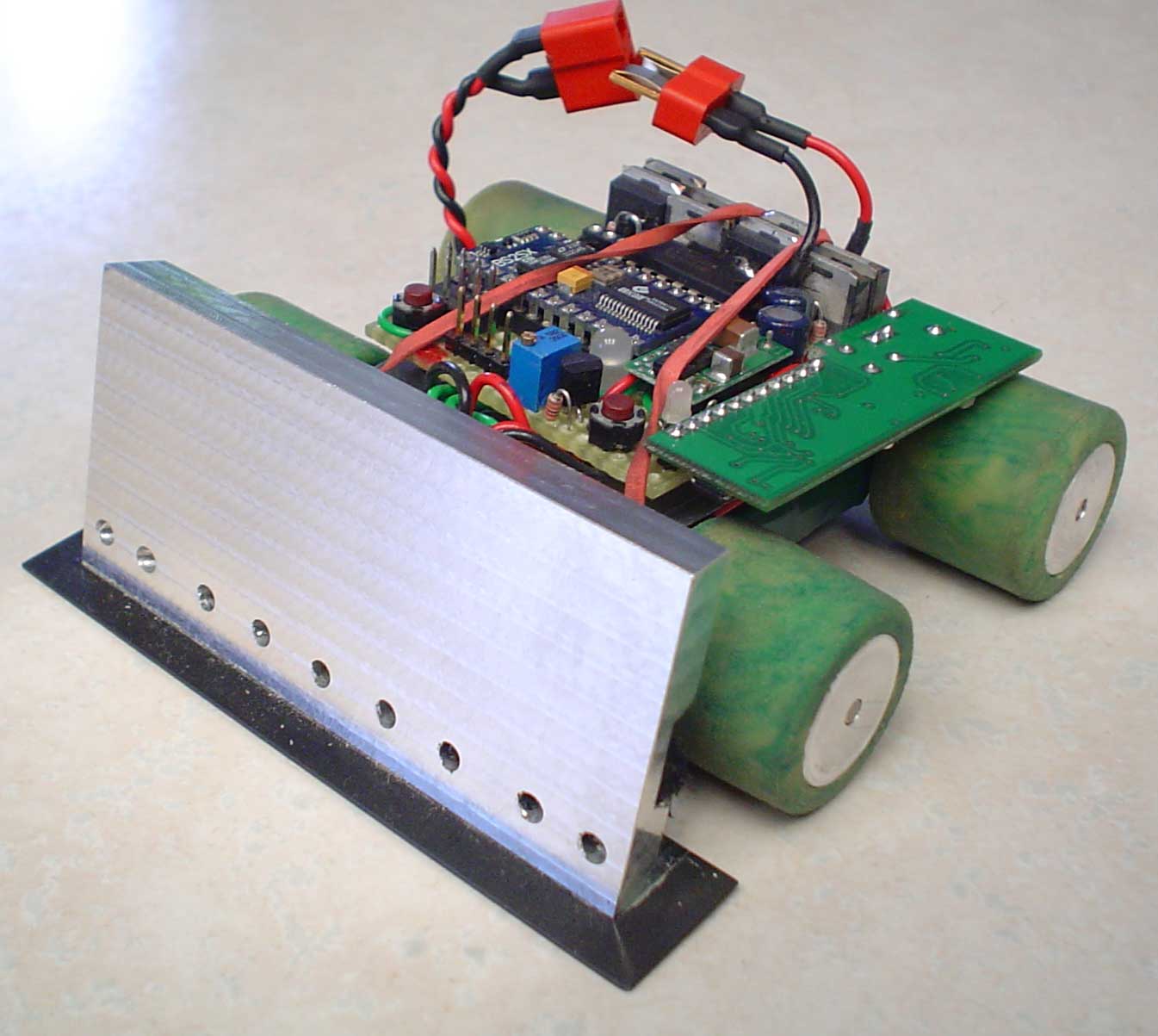
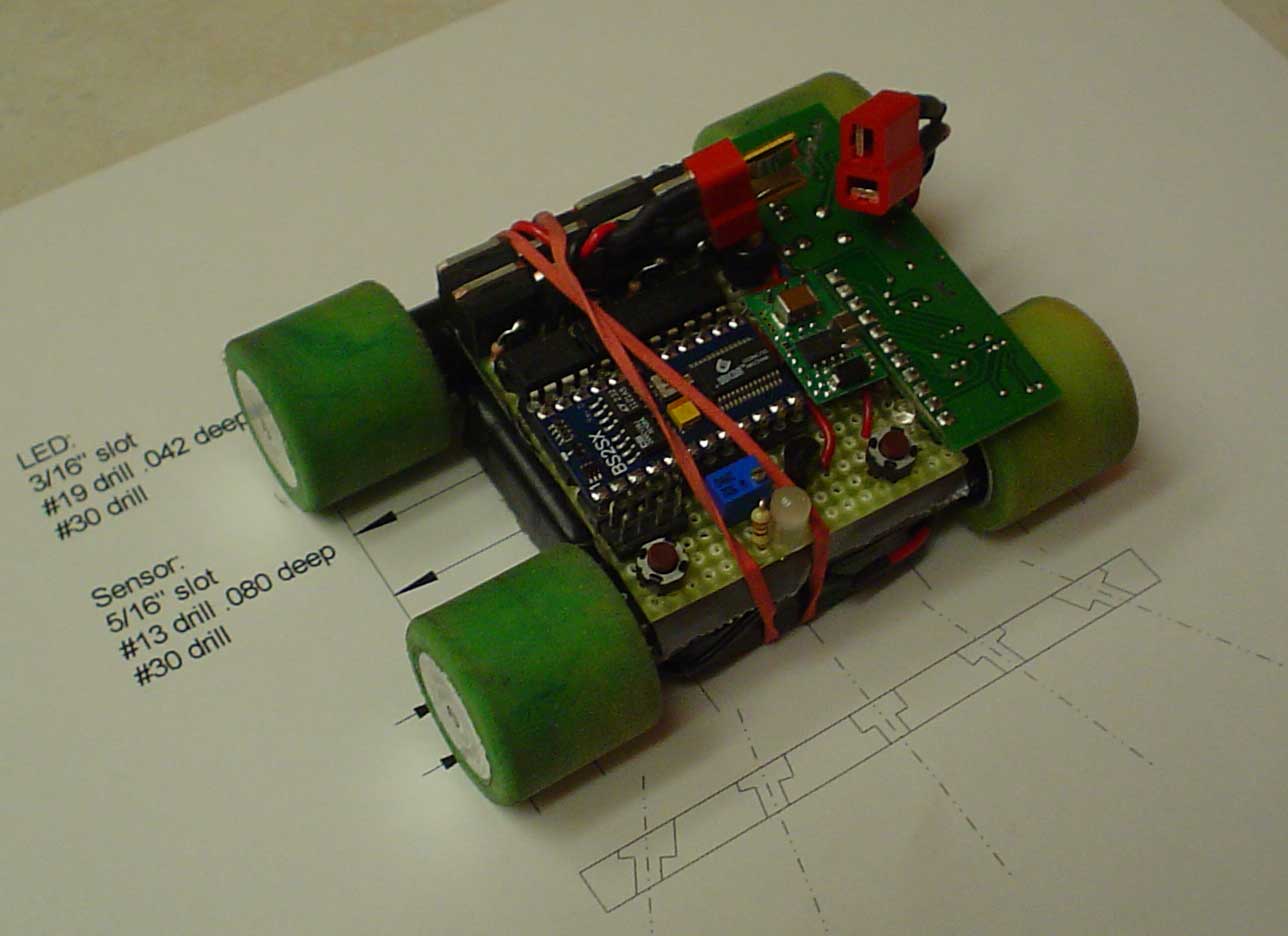
 ExSpurt Mule’s bumper was machined out of .125” extruded aluminum. The problem with the thin bumper was that two of the IR LEDs stuck through the bumper and were exposed to contact. So the real ExSpurt’s bumper started out as 0.500” 2024 aluminum. Slots were milled and holes were drilled to mount the sensors. See other BrooksBots for details. Five IR LEDs were mounted in a 15° pattern, giving ExSpurt the typical 75° view. Only four sensors were used to save space. The two outer sensors were angled out at the normal 30°, while the two inner sensors were angled at 7°. ExSpurt Mule’s bumper was machined out of .125” extruded aluminum. The problem with the thin bumper was that two of the IR LEDs stuck through the bumper and were exposed to contact. So the real ExSpurt’s bumper started out as 0.500” 2024 aluminum. Slots were milled and holes were drilled to mount the sensors. See other BrooksBots for details. Five IR LEDs were mounted in a 15° pattern, giving ExSpurt the typical 75° view. Only four sensors were used to save space. The two outer sensors were angled out at the normal 30°, while the two inner sensors were angled at 7°. |
||||||||
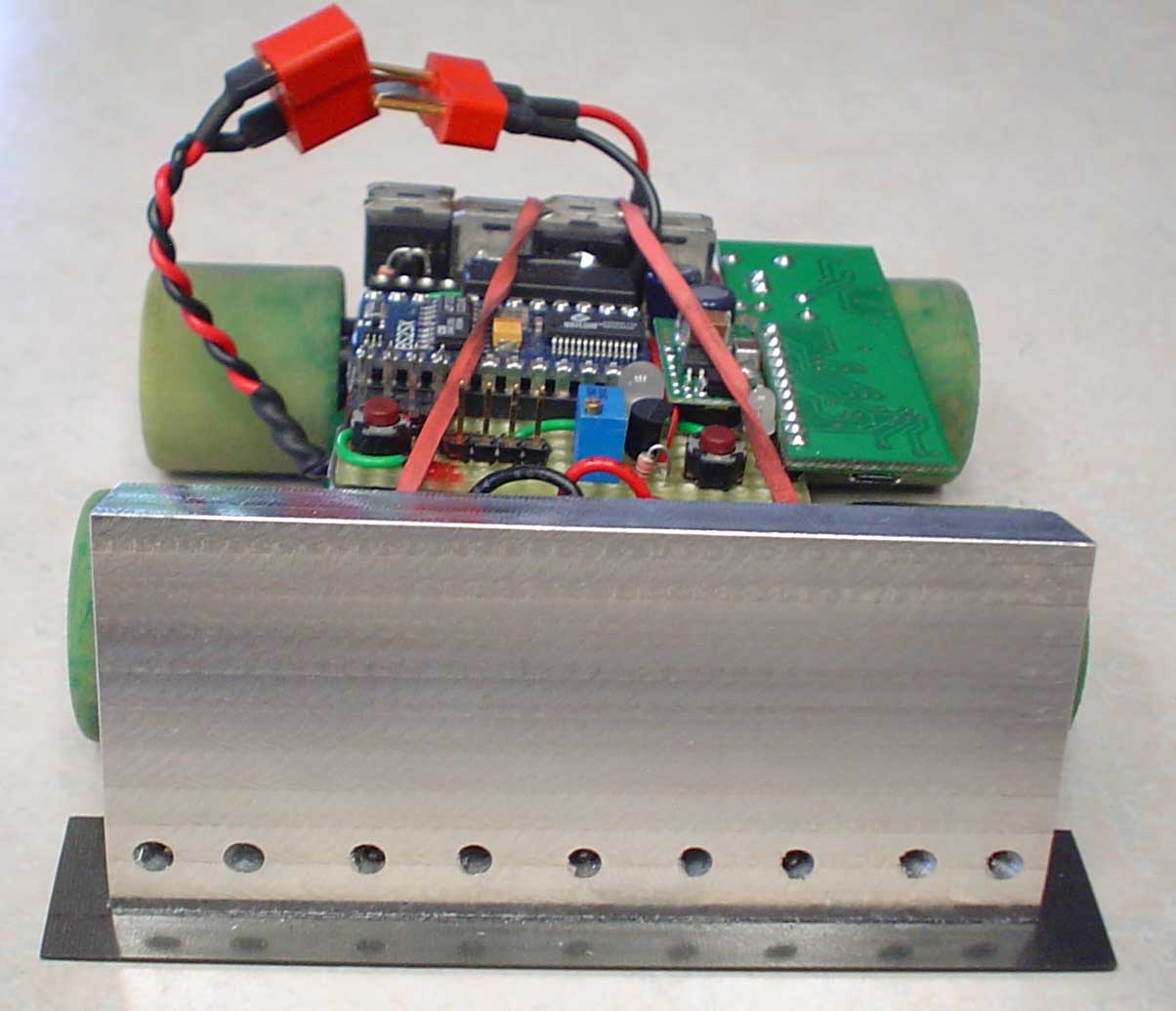 A horizontal slot was milled in the back of the bumper to allow room for the sensor wires and provide a good place to attach the chassis. Finally, the thickness of the aluminum was reduced to .350” and the bottom was angled 14° so that the sensors pointed up slightly. The 14° angle prevents the sensors from seeing the surface, yet will detect a pencil laying on the surface. The bumper was finished. A horizontal slot was milled in the back of the bumper to allow room for the sensor wires and provide a good place to attach the chassis. Finally, the thickness of the aluminum was reduced to .350” and the bottom was angled 14° so that the sensors pointed up slightly. The 14° angle prevents the sensors from seeing the surface, yet will detect a pencil laying on the surface. The bumper was finished. |
||||||||
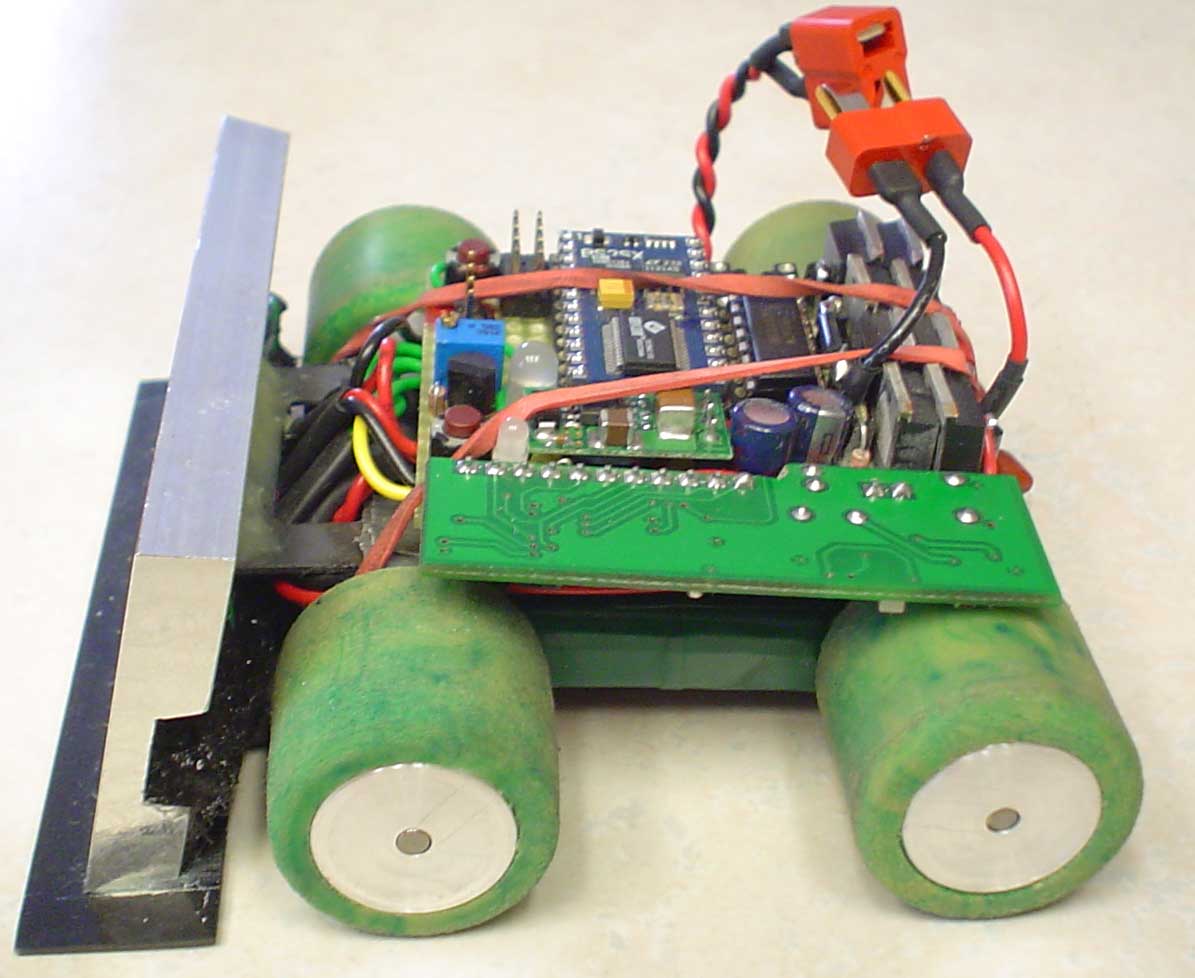
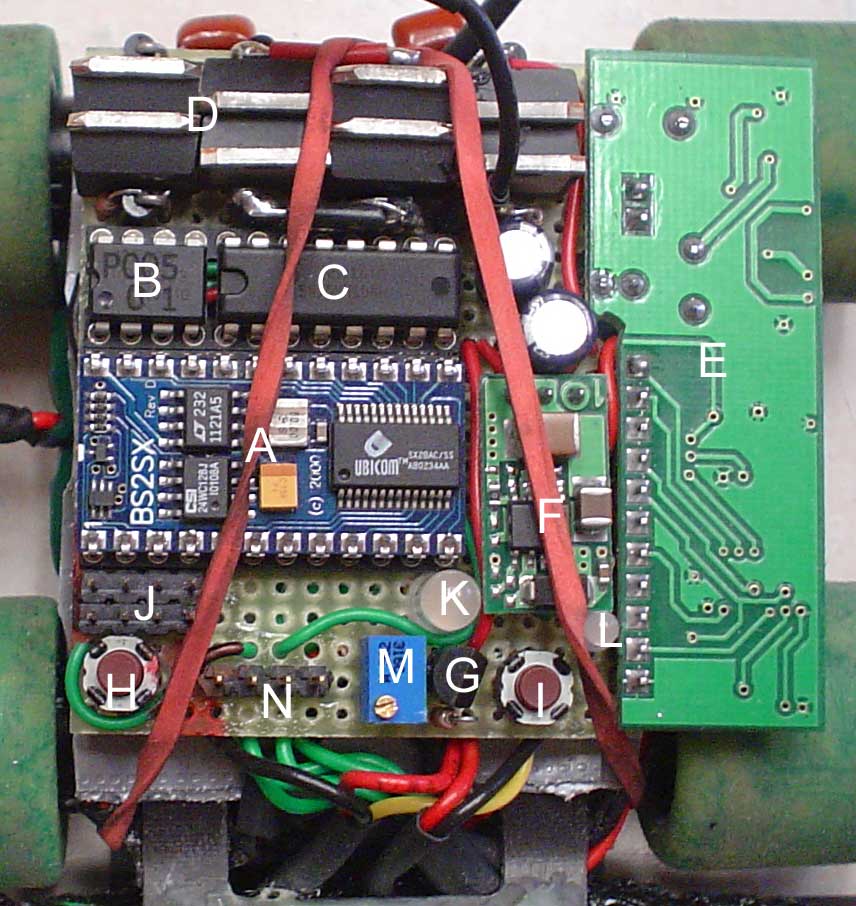 The motor control is similar to earlier sumo BrooksBots. The only change is that everything is packaged a little tighter. The motor control is similar to earlier sumo BrooksBots. The only change is that everything is packaged a little tighter.
|
||||||||
 The initial running tests on the mule were performed without bumper or control board. The motors were wired directly a three cell battery pack of MaxAmps 430 ma-hr Lipos. When place on the basement floor, the little robot spurted across the room, ricocheted off of three walls and buried itself in a corner, wheels spinning. After that experience, the name ExSpurt stuck. The next test was with the control board (still no bumper) programmed for a one second full speed run. ExSpurt didn’t make it far. It just flipped over on its back and spun its wheels upside down. The weight of a bumper was required to prevent the 180 degree wheelie. Finally the bumper was attached. The total weight of ExSpurt Mule was 325 grams…way too light. The one second speed run resulted in much wheel spin on acceleration and wheel lock up and sliding while braking. The total distance traveled was close to 100 inches. It must be dirty tires and dirty floor causing the wheel spin. So, the floor was mopped and the tires were cleaned in alcohol but the wheel spinning and lockup continued. We are just going to have to live with it. Make a note to reduce motor speed with the controller and never, never run full speed. A run at half speed from the control produced 47 inches per second. The initial running tests on the mule were performed without bumper or control board. The motors were wired directly a three cell battery pack of MaxAmps 430 ma-hr Lipos. When place on the basement floor, the little robot spurted across the room, ricocheted off of three walls and buried itself in a corner, wheels spinning. After that experience, the name ExSpurt stuck. The next test was with the control board (still no bumper) programmed for a one second full speed run. ExSpurt didn’t make it far. It just flipped over on its back and spun its wheels upside down. The weight of a bumper was required to prevent the 180 degree wheelie. Finally the bumper was attached. The total weight of ExSpurt Mule was 325 grams…way too light. The one second speed run resulted in much wheel spin on acceleration and wheel lock up and sliding while braking. The total distance traveled was close to 100 inches. It must be dirty tires and dirty floor causing the wheel spin. So, the floor was mopped and the tires were cleaned in alcohol but the wheel spinning and lockup continued. We are just going to have to live with it. Make a note to reduce motor speed with the controller and never, never run full speed. A run at half speed from the control produced 47 inches per second. |
||||||||
Videos of the 2007 NEIRG competition:
|
||||||||
 After the NEIRG, a 100 gram weight was formed and glued in ExSpurt Mule bringing the total weight up to 430 grams. Push tests with various composition tires resulted in a peak of 1080 grams of shove. ExSpurt’s push and speed seem to be a good combination. After the NEIRG, a 100 gram weight was formed and glued in ExSpurt Mule bringing the total weight up to 430 grams. Push tests with various composition tires resulted in a peak of 1080 grams of shove. ExSpurt’s push and speed seem to be a good combination. |
||||||||
Videos of the 2007 Central Illinois Bot Brawl competition:
|