FireBall
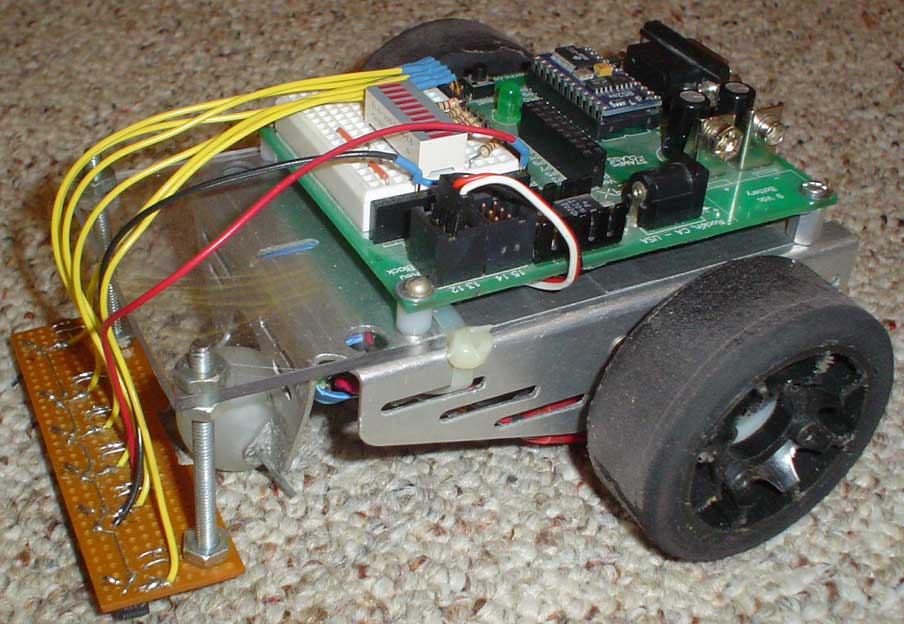 Expressway was a very easy line follower to build and program. Since line following was so easy, why not build a fast line follower? Extra Parts was the result. It used the same line sensors as Expressway, the same wheelbase as Expressway, the original motors out Expressway was a very easy line follower to build and program. Since line following was so easy, why not build a fast line follower? Extra Parts was the result. It used the same line sensors as Expressway, the same wheelbase as Expressway, the original motors out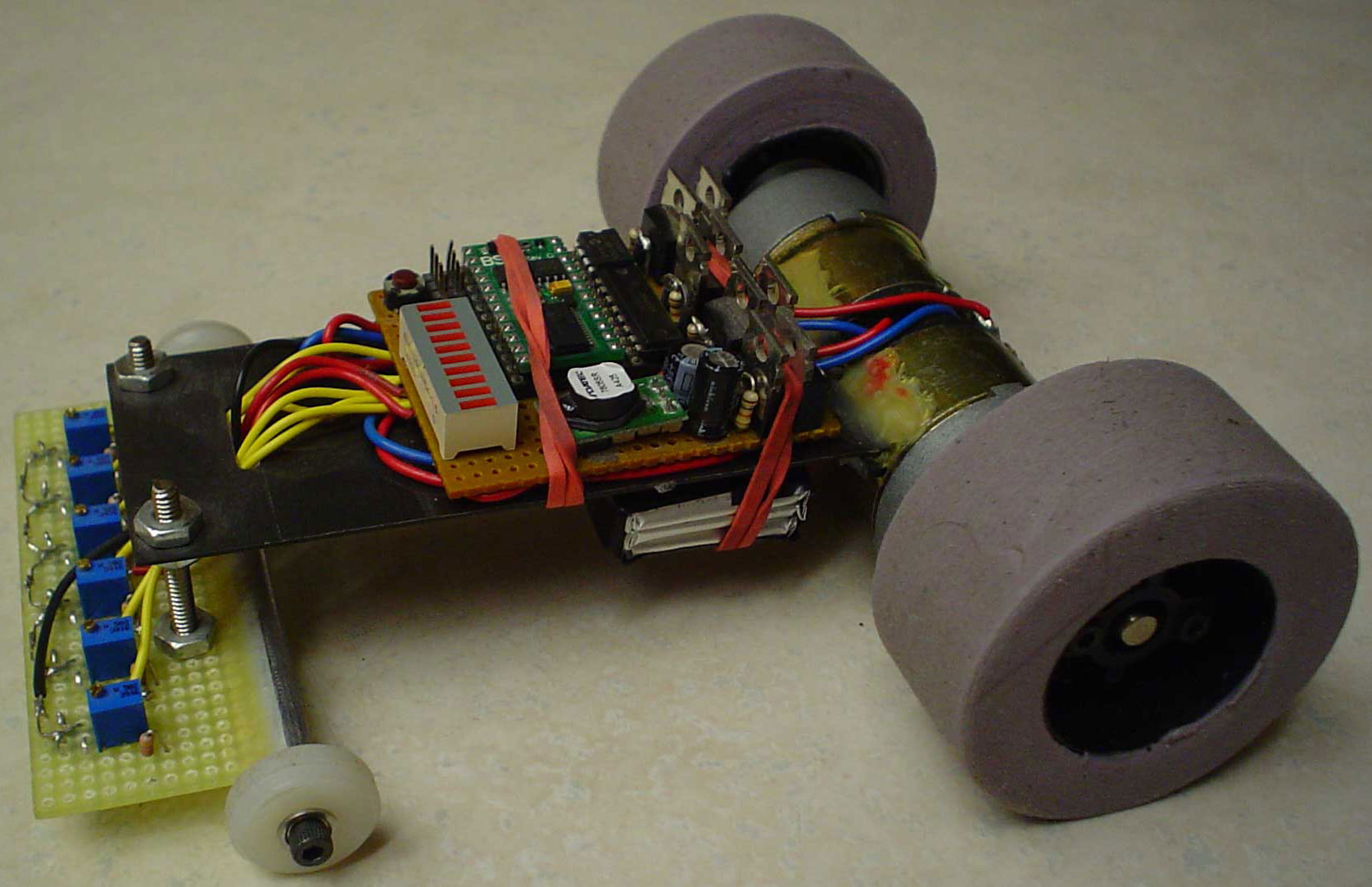 of Excuse, a spare NiMh battery, and an old control board that was in the junk box. The problem with Extra Parts was that it would not follow a straight line. About a year of fine tuning the PID algorithm and settings, and it still would not follow a line. There was a spare LiPo battery laying around, so that went into Extra Parts in place of the NiMh and everything started to work! So, in addition to speed, torque, and traction, add low weight (or mass) to the desirable characteristics of a good line follower. After all of that fun, it seemed like the ExSpurt chassis would make a good line follower since it had the proper characteristics. of Excuse, a spare NiMh battery, and an old control board that was in the junk box. The problem with Extra Parts was that it would not follow a straight line. About a year of fine tuning the PID algorithm and settings, and it still would not follow a line. There was a spare LiPo battery laying around, so that went into Extra Parts in place of the NiMh and everything started to work! So, in addition to speed, torque, and traction, add low weight (or mass) to the desirable characteristics of a good line follower. After all of that fun, it seemed like the ExSpurt chassis would make a good line follower since it had the proper characteristics. |
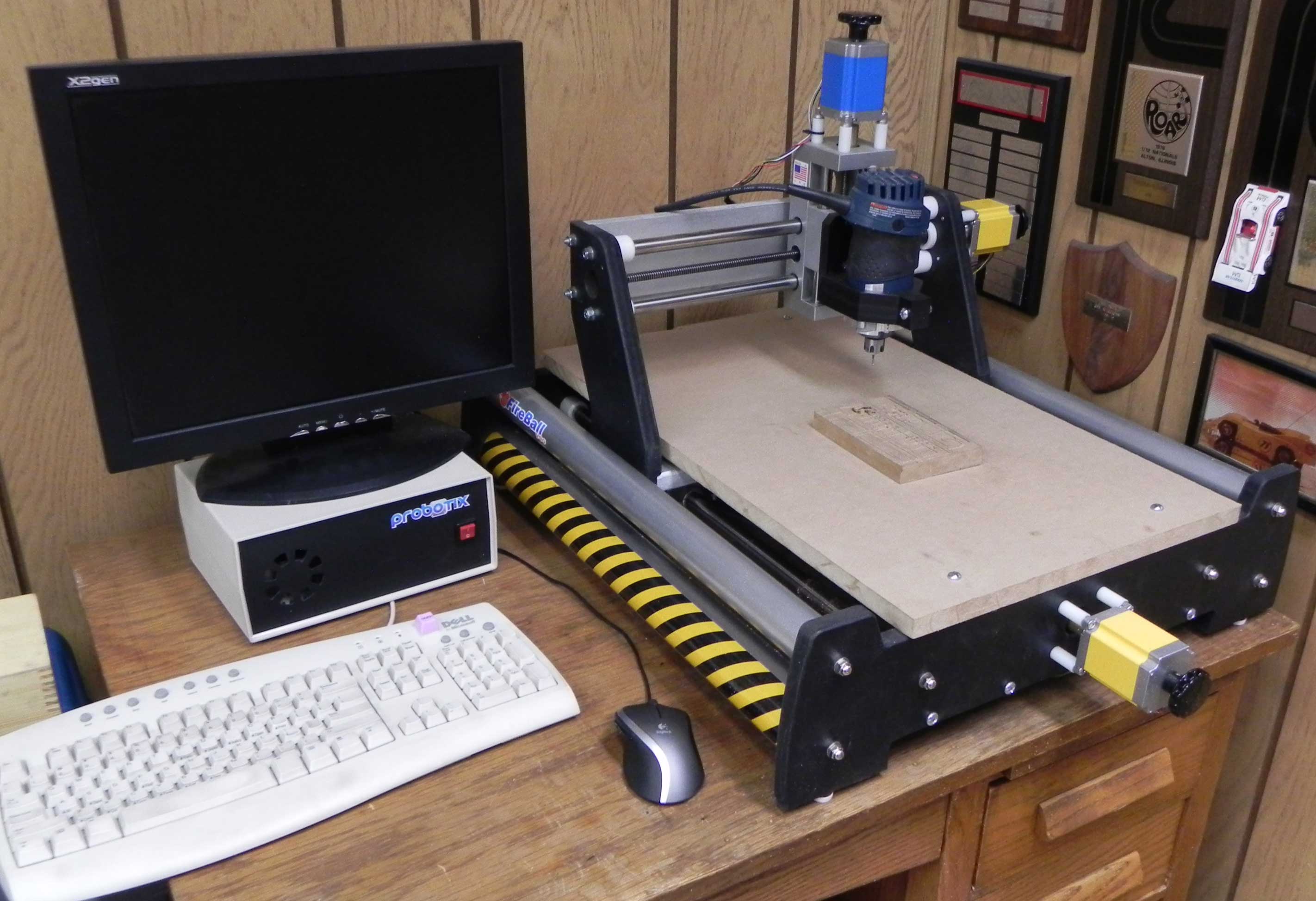 At the 2009 Peoria Bot Brawl, club member Len Sheldon was raffling off one of his Probotix FireBall V90 machines. Years ago some friends tried to get me interested in a CNC mill, but there was too much other stuff to do. Now, this new machine looked very interesting. So, I tried to buy all of the raffle tickets, but ran out of money before they ran out of raffle tickets. Unfortunately, I didn't win it. Fortunately, My videographer, Cathy, did win it. Unfortunately, I had to listen to every thing that she was going to make for the five hour drive home. Fortunately, Cathy didn't have room for it at her house so FireBall V90 is in my basement. Unfortunately, I have to ask permission to use it every time. At the 2009 Peoria Bot Brawl, club member Len Sheldon was raffling off one of his Probotix FireBall V90 machines. Years ago some friends tried to get me interested in a CNC mill, but there was too much other stuff to do. Now, this new machine looked very interesting. So, I tried to buy all of the raffle tickets, but ran out of money before they ran out of raffle tickets. Unfortunately, I didn't win it. Fortunately, My videographer, Cathy, did win it. Unfortunately, I had to listen to every thing that she was going to make for the five hour drive home. Fortunately, Cathy didn't have room for it at her house so FireBall V90 is in my basement. Unfortunately, I have to ask permission to use it every time. |
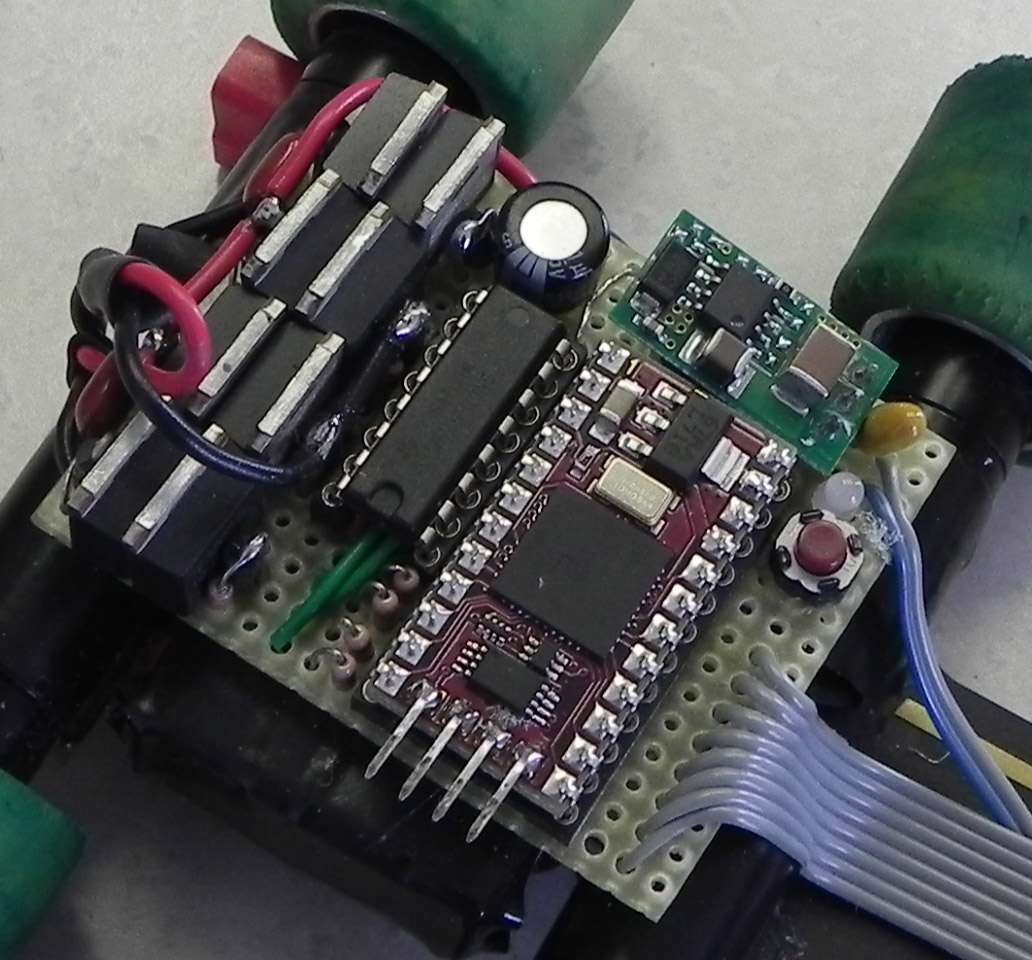
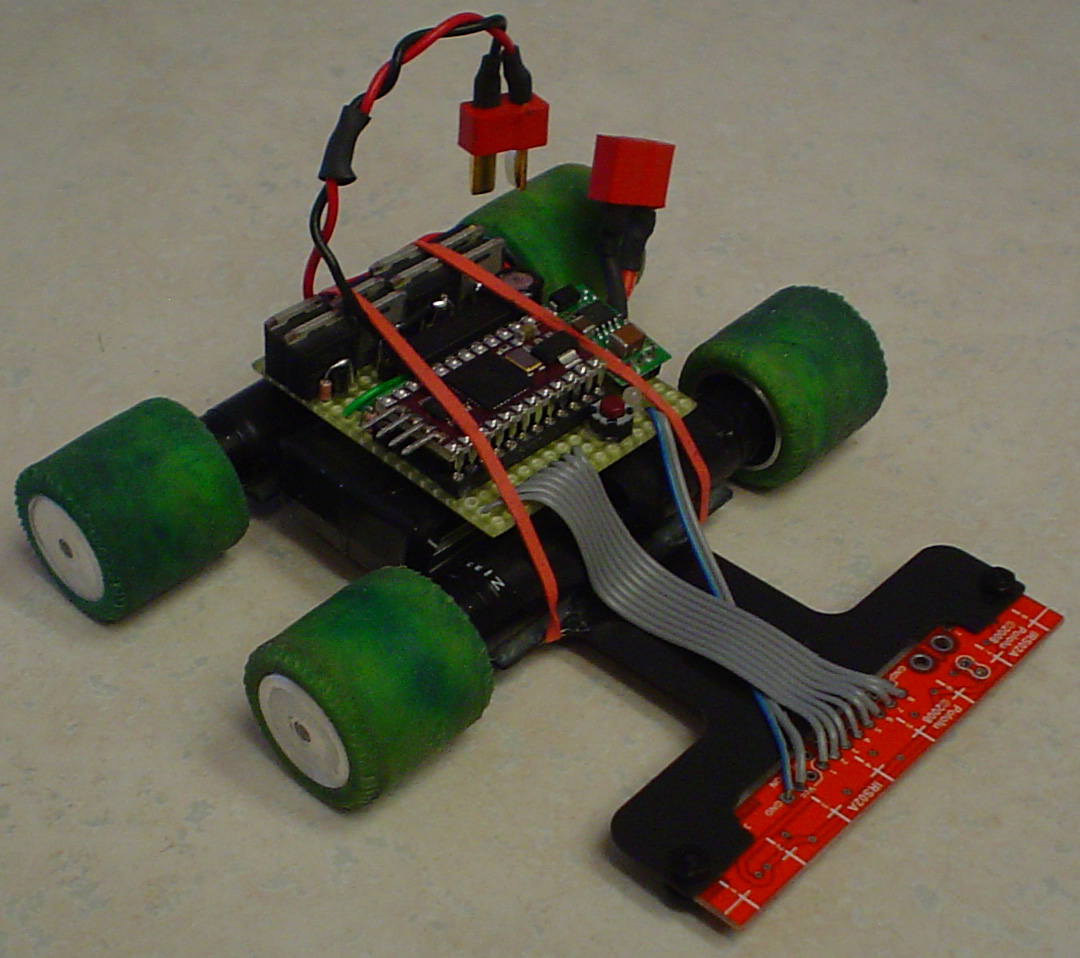
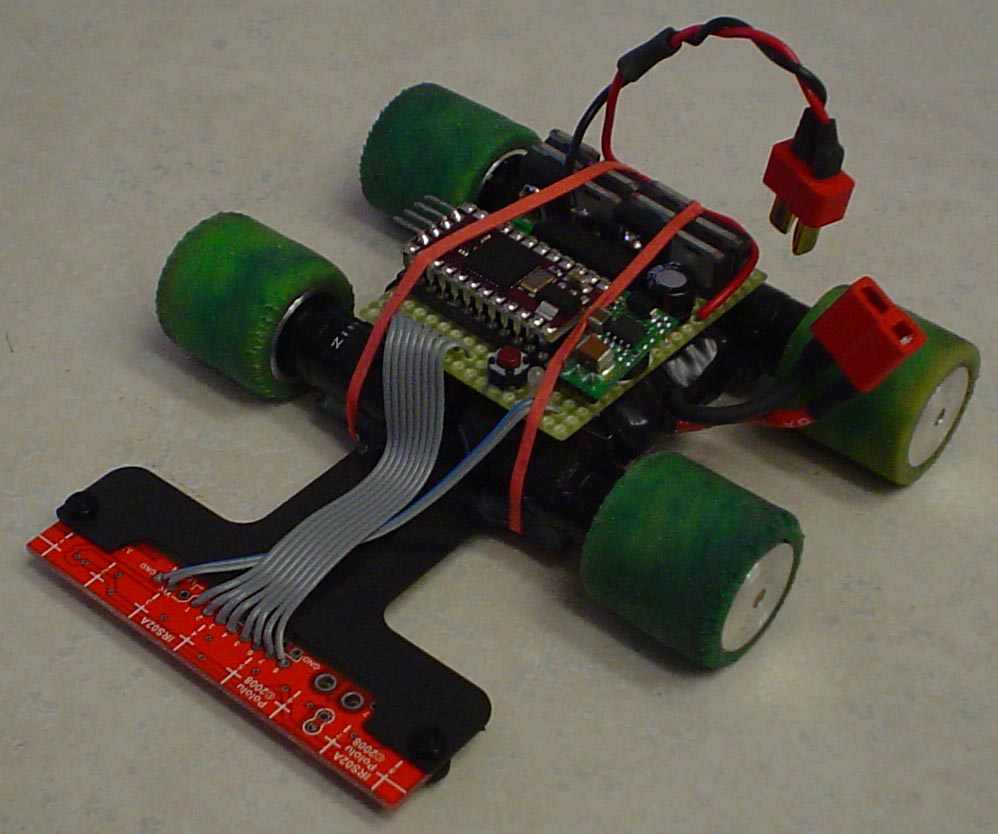
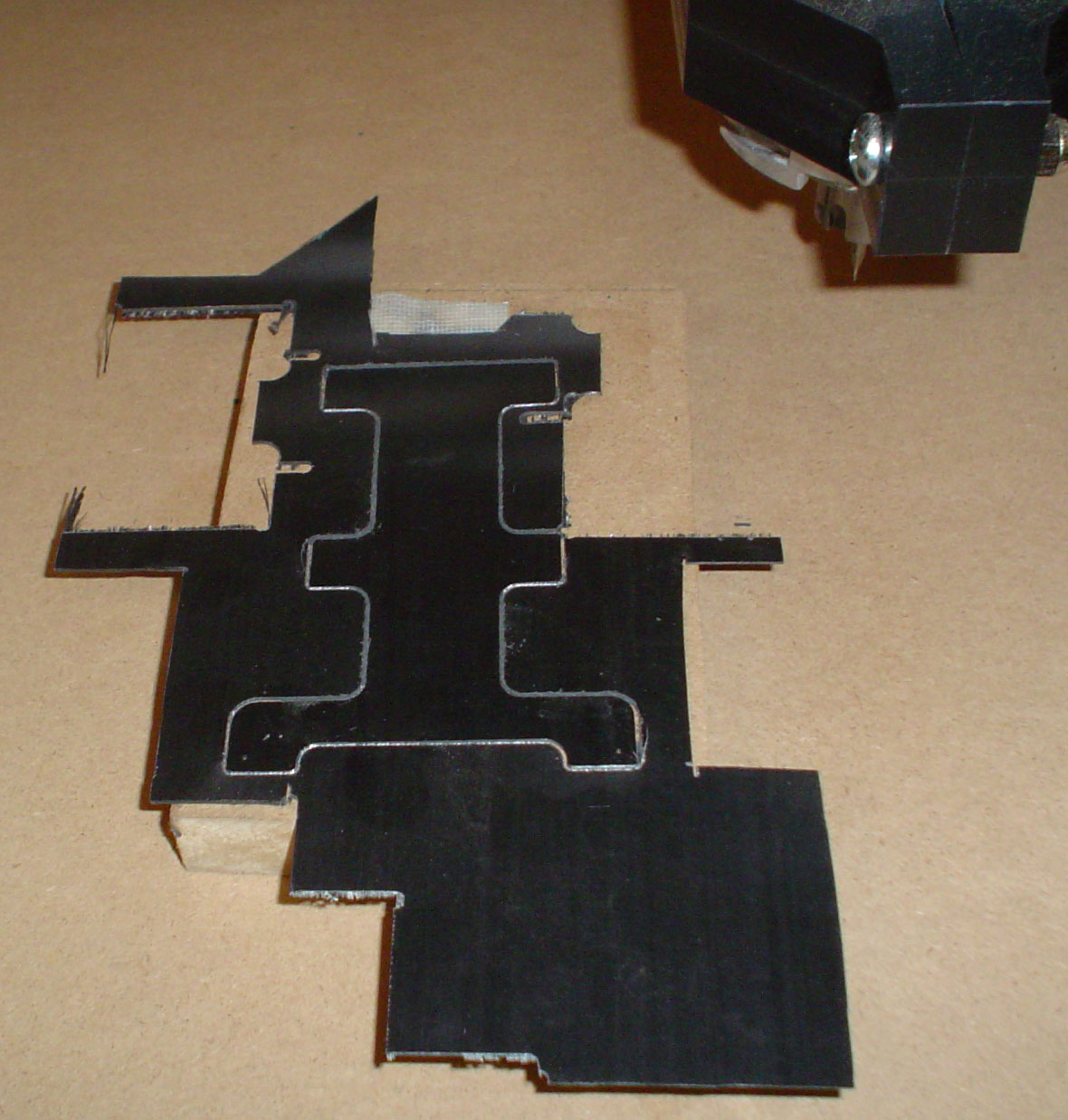 I had extra Maxon motors, wheels, and batteries from ExSpurt. The Pololu QTR-8RC is a much nicer sensor package that was used on Expressway and Extra Parts, so one was added to the project. A new chassis was required that was a little wider and had a front sensor mount. Late one Saturday evening, I started the chassis drawing. It turned out well, so on to download Vectric Cut 2D software and go through the tutorials. G code was generated. After several "air" parts were made, the chassis was cut out of carbon fiber, my first CNC part. The whole thing from initial drawing to final finished chassis was done in about an hour! This is the way to make robots! I had extra Maxon motors, wheels, and batteries from ExSpurt. The Pololu QTR-8RC is a much nicer sensor package that was used on Expressway and Extra Parts, so one was added to the project. A new chassis was required that was a little wider and had a front sensor mount. Late one Saturday evening, I started the chassis drawing. It turned out well, so on to download Vectric Cut 2D software and go through the tutorials. G code was generated. After several "air" parts were made, the chassis was cut out of carbon fiber, my first CNC part. The whole thing from initial drawing to final finished chassis was done in about an hour! This is the way to make robots! |
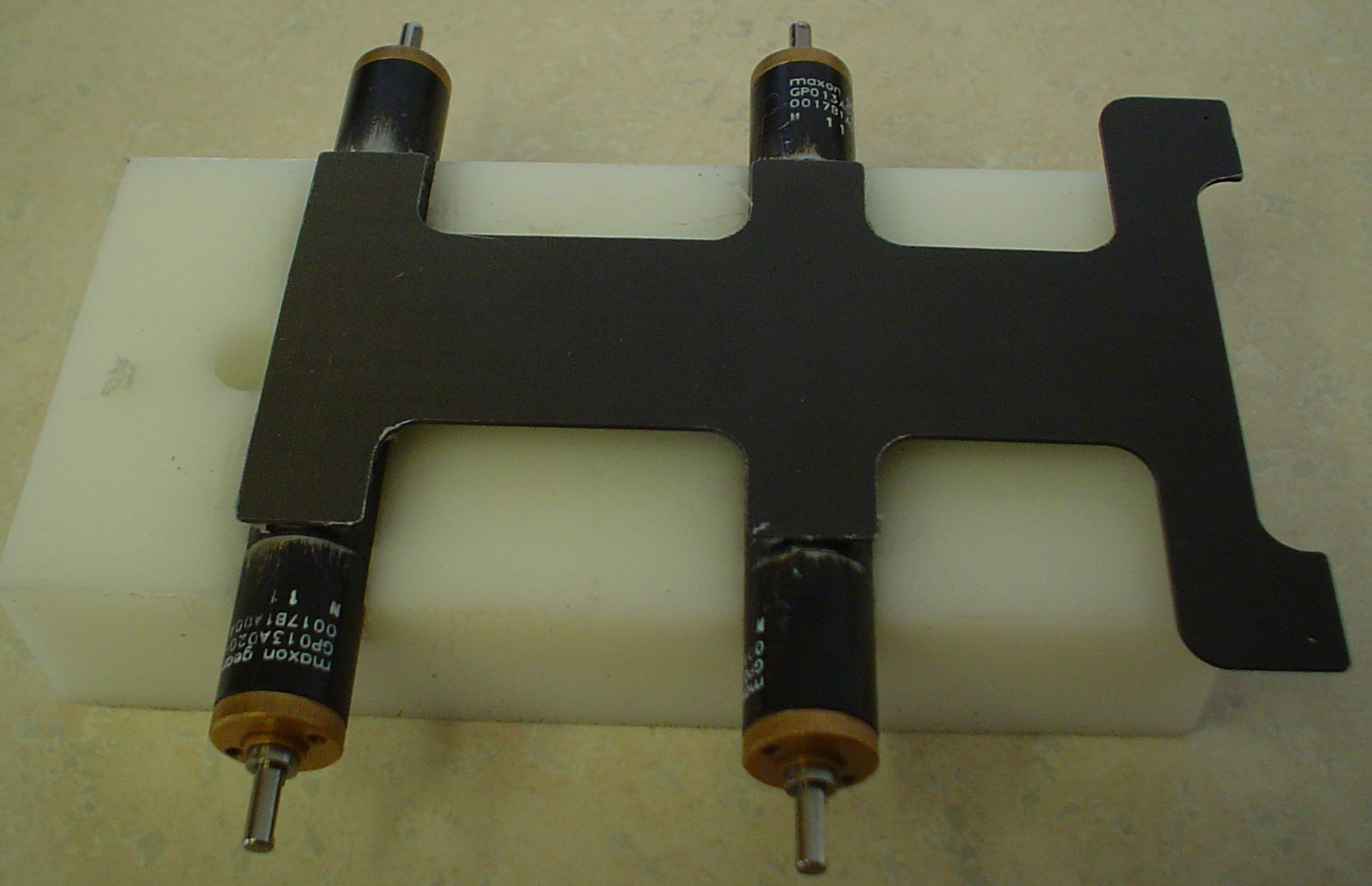 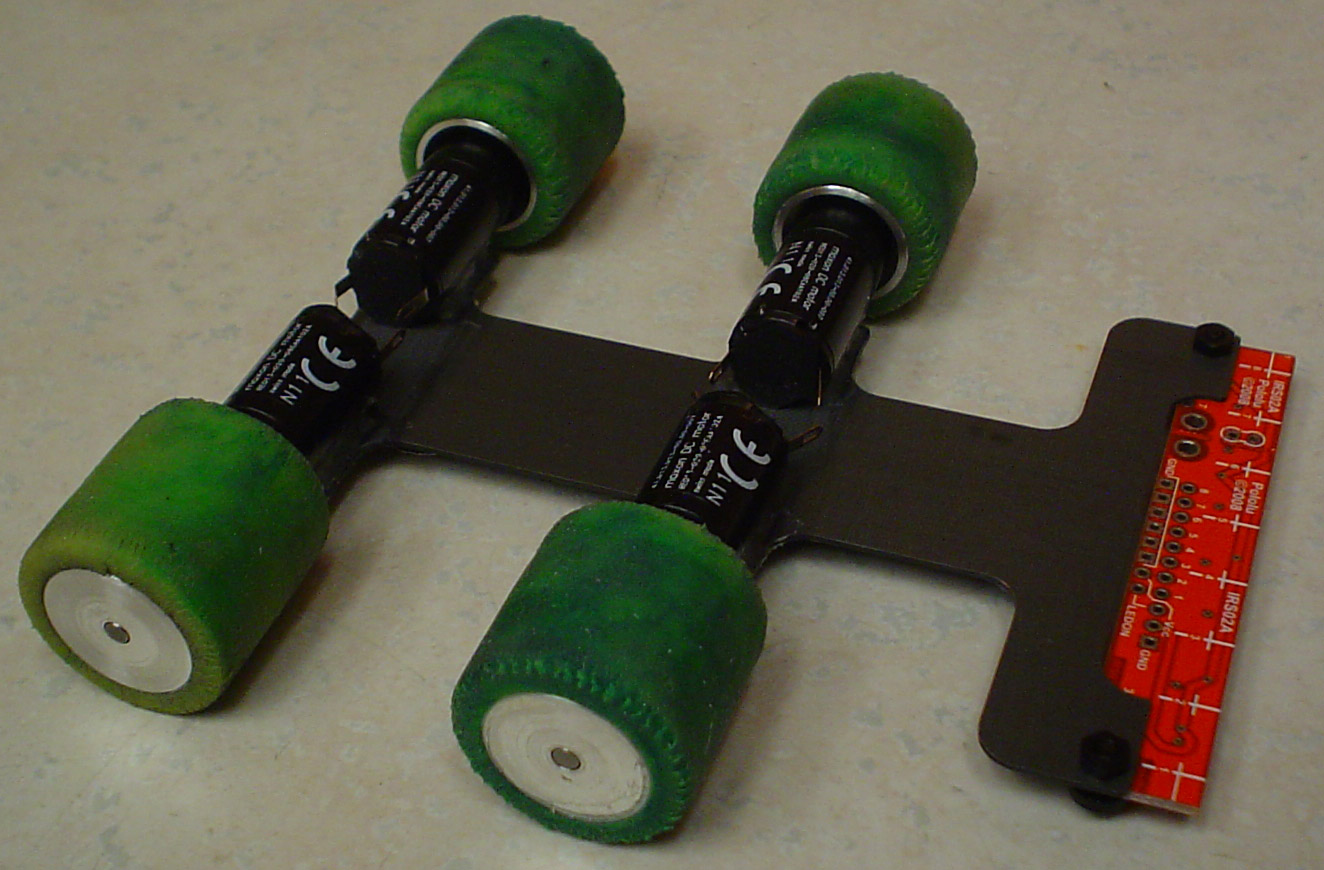 Take the new chassis, four Maxon motors, and the old ExSpurt jig, add some epoxy, let cure overnight, and the base for a new line follower has been built. Take the new chassis, four Maxon motors, and the old ExSpurt jig, add some epoxy, let cure overnight, and the base for a new line follower has been built. |
Of course, all of the code was downloaded from Parallax forums and the Propeller Object exchange. The Spin Stamp only uses three cogs, the PID loop, QTis sensor, and SN754410 motor driver. The only change that was made to the SN754410 object was the pin numbers. The QTis object was changed quite a bit. First, only 2,000 counts (25usec) is used to charge up the capacitor. Then the discharge lasts for 40,000 counts (0.5 msec). Finally, a Case command was added to convert the sensor input to an integer offset from center. The Case command in Spin wasn't very fast at about 250 usec, so it was run during the 40,000 counts that the capacitors were discharging. The PID loop was extensively modified. It had the following variables:
|
|