Sticky
| For the Northeast Indiana Robot Games at Science Central February, 2002, both Rick and Rich ran in the 3 Kg Autonomous Sumo class. The night before the event we sparred with each other and Rich burned out one of his servo motors. That night he burned out every servo in the house trying to get a useable set in his robot. After that disaster, Rich decided to build a new sumo based on drive motors other than servos. | ||
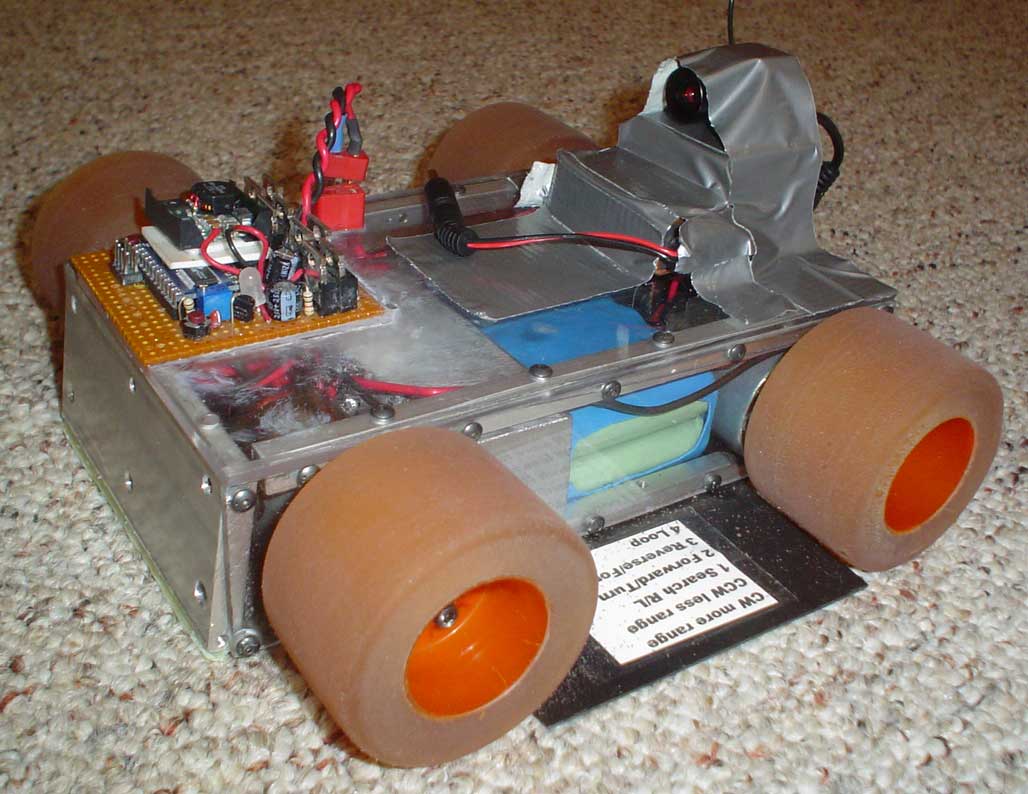
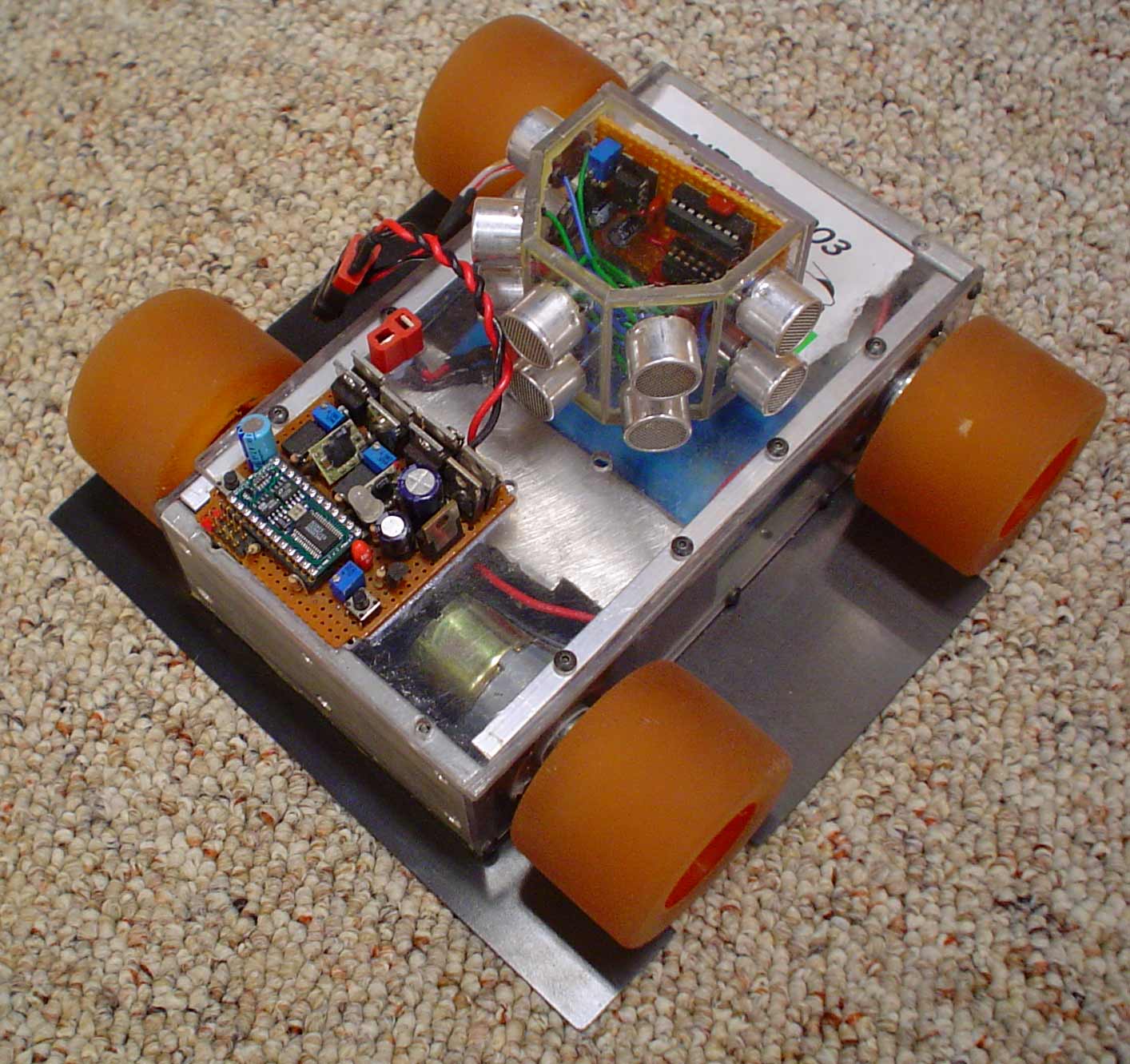
 This new sumo featured a clear .125 inch Lexan box body with Lynxmotion 6 Volt 30:1 ratio motors. The body bottom is a piece of .032 inch graphite laminate that extends forward and to the side for wedge protection. The control system consisted of a BS2 driving two servo electronics boards from burned out servos. The servo electronics powered the H Bridge via an NEC PS2501-4 optical isolator. The H Bridge was made of IRF940 and IRF9540 FETs. With six AA Nickel-Metal Hydride batteries, it went 28 inches per second. This new sumo featured a clear .125 inch Lexan box body with Lynxmotion 6 Volt 30:1 ratio motors. The body bottom is a piece of .032 inch graphite laminate that extends forward and to the side for wedge protection. The control system consisted of a BS2 driving two servo electronics boards from burned out servos. The servo electronics powered the H Bridge via an NEC PS2501-4 optical isolator. The H Bridge was made of IRF940 and IRF9540 FETs. With six AA Nickel-Metal Hydride batteries, it went 28 inches per second. |
||
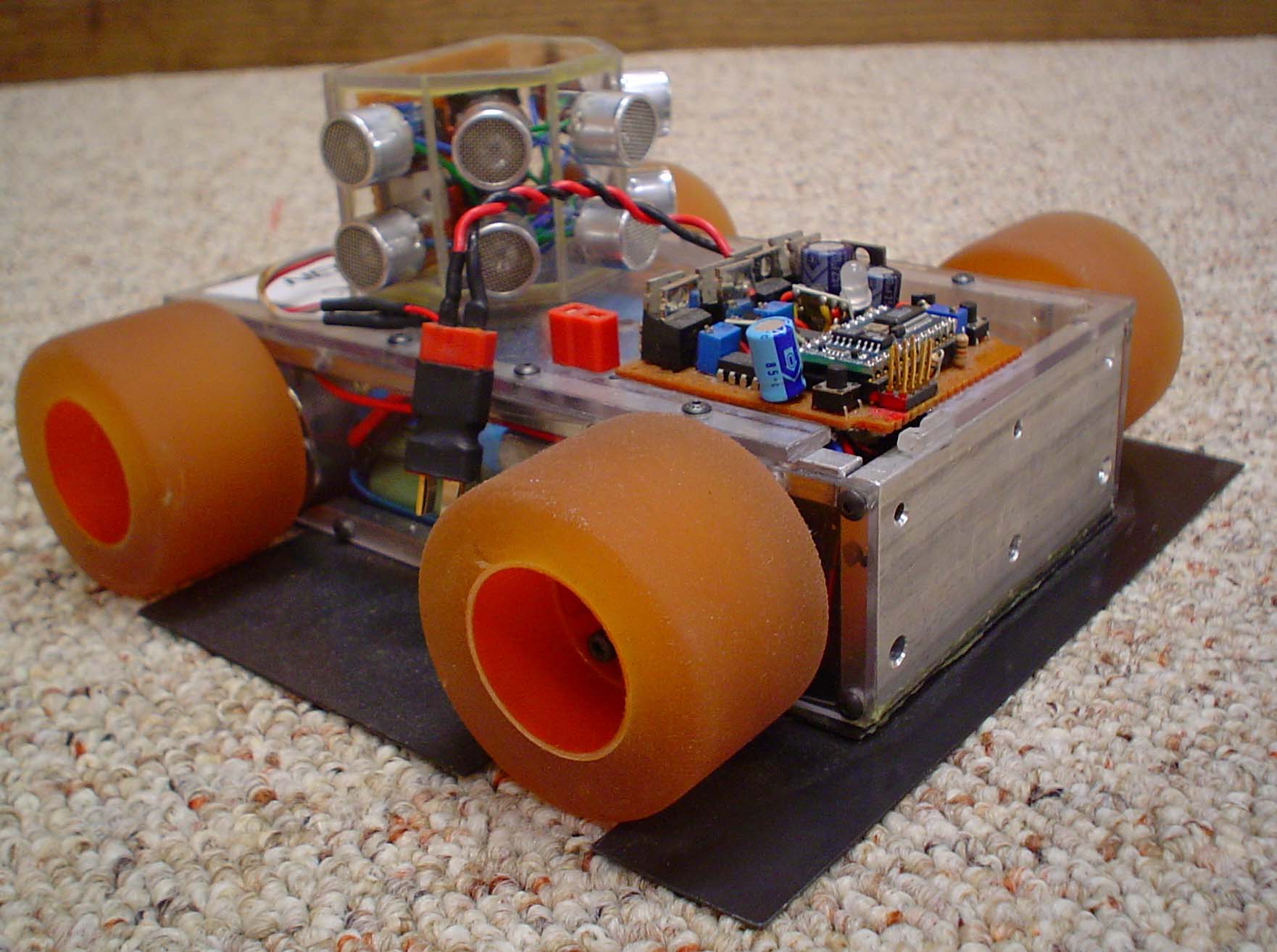
 The sensor package consisted of three IR proximity detectors with one QEC113 and one PNA4602 detector each. The QEC113s were powered by an LM317LZ adjustable voltage power supply giving the operator a great deal of range adjustment for specific local lighting conditions. The sensor package consisted of three IR proximity detectors with one QEC113 and one PNA4602 detector each. The QEC113s were powered by an LM317LZ adjustable voltage power supply giving the operator a great deal of range adjustment for specific local lighting conditions. |
||
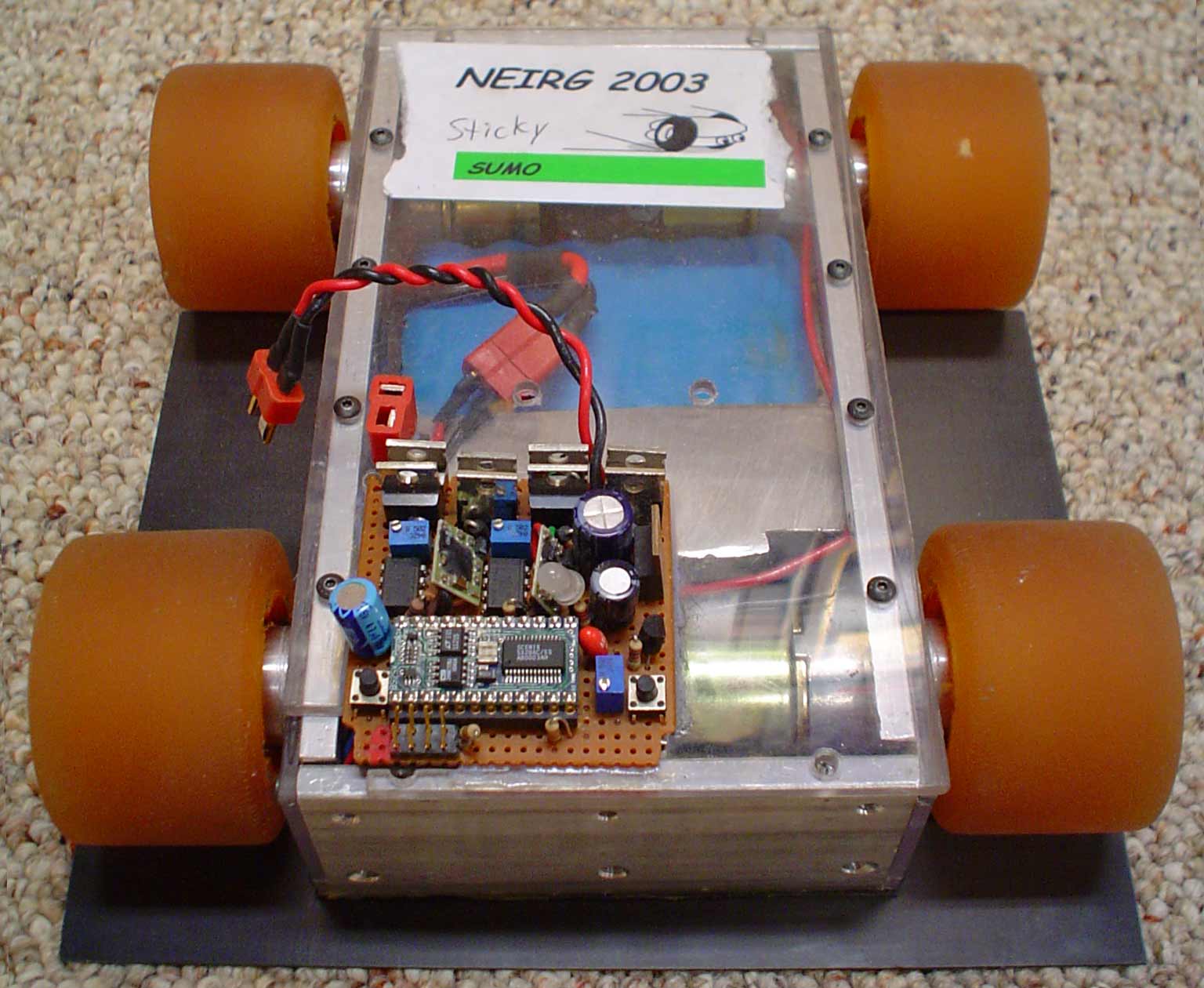
 Rich won the 3 Kg class at the Summer 2002 NEIRG competition. After that event we started experimenting with molded tires and the Exert-O’Meter. Since this sumo was the tire test mule, it soon adopted the name “Sticky”. Rich won the 3 Kg class at the Summer 2002 NEIRG competition. After that event we started experimenting with molded tires and the Exert-O’Meter. Since this sumo was the tire test mule, it soon adopted the name “Sticky”. |
||
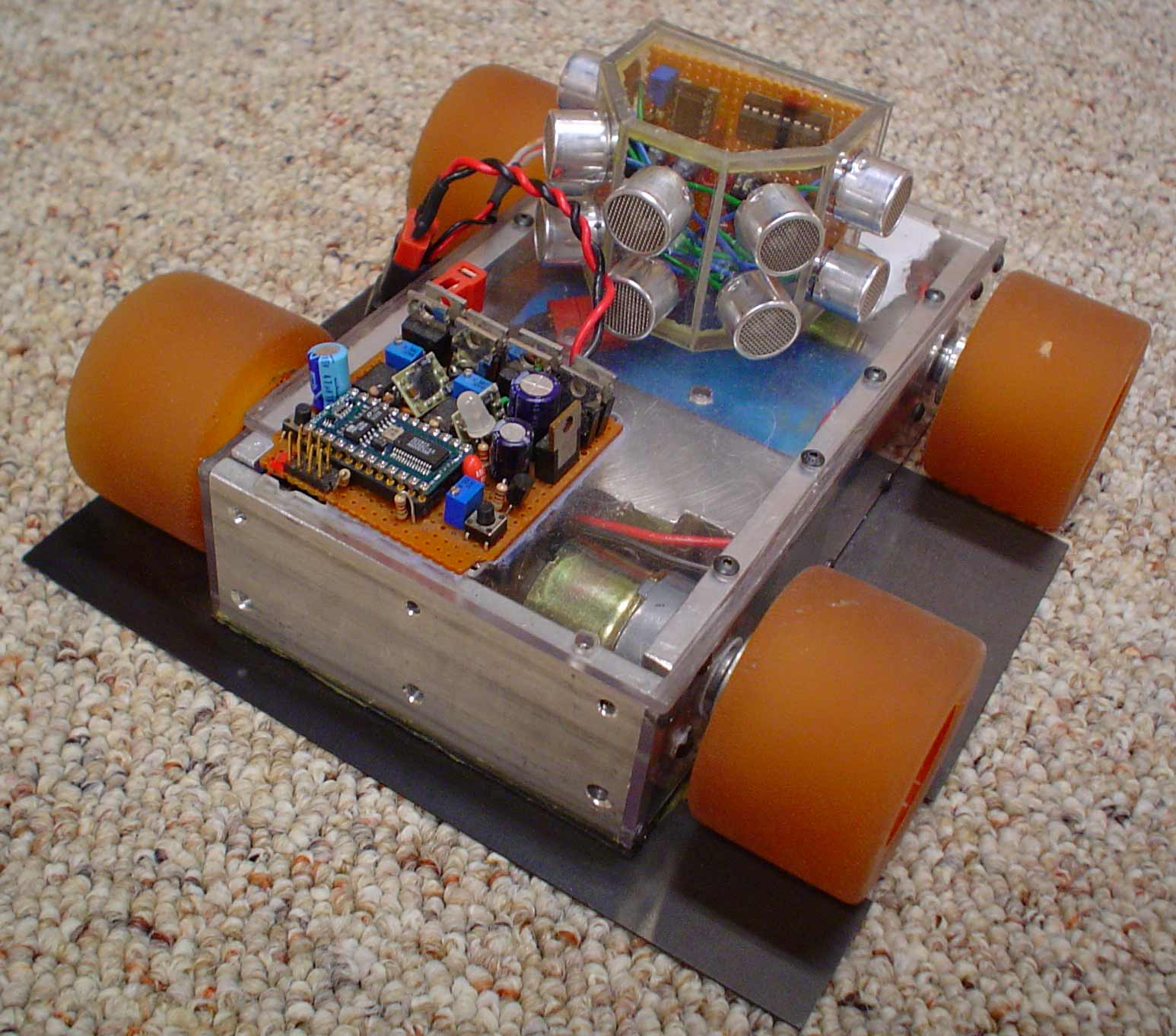
| The first set of molded urethane tires produced 7 pounds 10 ounces of push from the 3 pound 10 ounce Sticky (all of the extra lead was removed). The amazing part of this first test was that one tire was completely off of the ground and another was stalled! The 6 Volt 30:1 motors were replaced with four 7.2 Volt 50:1 ratio Lynxmotion motors and a ten cell AA Nickel-Metal Hydride battery pack was added. The motors were adjusted so that all four tires pushed on the ground evenly. With the same urethane tires, Sticky (at 3 pounds 10.2 ounces) could push 9 pounds 12 ounces. More tires were molded out of silicone and Sticky was able to push between 10 pounds 12.4 ounces and “ERROR” (it is a 10 pound scale!). Sticky can push three times its weight! | ||
| NOTE: These first tests were performed with ¼ inch ID hubs on the motor’s 6mm shafts and there was a lot of bouncing and measurement fluctuation. Later tests with proper 6mm hubs and the urethane tires resulted in smooth power flow and constant off-scale “ERROR” readings. The new motors and battery pack produced 30 inches per second top speed. | ||
| For the February 2003 NEIRG Sticky featured our first experimental sonar jammer and the original set of urethane tires. It easily won the 3 Kg Sumo class for high school age competitors. The sonar jammer impact on the competition was not obvious. | ||
 Only two changes were made for the Summer 2003 NEIRG. A new, more powerful Sonar jammer (from Flaming P’nut) was installed and the battery pack was increased to 12 AA Nickel-Metal Hydride cells. Sticky took second (behind Shunji) in the 3 Kg open class. The sonar jammer appeared to be very effective, so we requested that the rules be changed to outlaw electronic jammers. Only two changes were made for the Summer 2003 NEIRG. A new, more powerful Sonar jammer (from Flaming P’nut) was installed and the battery pack was increased to 12 AA Nickel-Metal Hydride cells. Sticky took second (behind Shunji) in the 3 Kg open class. The sonar jammer appeared to be very effective, so we requested that the rules be changed to outlaw electronic jammers. |
||
 After the Summer 2003 NEIRG, Sticky was stripped of its sonar jammer and the BS2SX was removed for other projects. It just sat on the shelf, lonely and forgotten, for six months. The morning of the 2004 NEIRG Winter Games, Rich decided to take Sticky along. A little charge in the battery and the BS2SX out of Expendable brought Sticky to life. It was allowed to enter under the pseudonym of “Blown”. Blown managed a second place among a very large class of high school heavy weights. After the Summer 2003 NEIRG, Sticky was stripped of its sonar jammer and the BS2SX was removed for other projects. It just sat on the shelf, lonely and forgotten, for six months. The morning of the 2004 NEIRG Winter Games, Rich decided to take Sticky along. A little charge in the battery and the BS2SX out of Expendable brought Sticky to life. It was allowed to enter under the pseudonym of “Blown”. Blown managed a second place among a very large class of high school heavy weights. |
||
Sticky went on to take second place in the Mini Sumo class at the 2004 Ohio Technology Organization, Robotics and Technology Invitational, and third place (behind Excuse and Shunji) in the heavy weight open sumo class at the Summer, 2004 NEIRG. Videos of the Summer, 2004 NEIRG competition:
|
||
Sticky's first match was against Beefhouse and here is the results: The second match was against Extrasensory: The third match was against Titan, the eventual winner: As can be seen, Sticky stopped running. The BS2SX was still running the program, but the motors were not moving. A few days later, I was pulling the motor control chips out and testing functions. Everything seemed OK. When all the chips were reinserted, Sticky ran perfectly again. I have no idea what went wrong. Oh, well. I can't be lucky all the time. Sticky goes back on the old, retired robot shelf to await the next wild idea. |